Questões de Concurso Público IBGE 2013 para Tecnologista - Cartografia
Foram encontradas 10 questões
A 2ª Edição da Norma Técnica para Georreferenciamento de Imóveis Rurais, do INCRA, aprovada em setembro de 2010, especifica a precisão para as diferentes classes de vértices empregados no levantamento dos limites dos imóveis. Tal especificação é feita na Tabela 1 da referida Norma, reproduzida abaixo. Também são especificados, nessa norma, os procedimentos quanto ao uso de métodos convencionais de levantamento (poligonação, irradiamento e triangulação) e quanto aos rastreios GPS. A Tabela 3 da Norma, (também reproduzida abaixo) apresenta a classificação das estações totais quanto à precisão.
Tabela 1 - Classificação de vértices quanto à finalidade, precisão e tipo
Classe Finalidade Precisão (M) Tipo
C1 Apoio básico / Apoio imediato / Limite ≤ 0,10 M
C2 Apoio imediato / Limite ≤ 0,20 M
C3 Desenvolvimento de poligonal / Limite ≤ 0,40 M, P
C4 Limite ≤ 0,50 M, P, V, O
C5 Limites naturais ≤ 2,00 P, V, O
C7 Limite - USO RESTRITO -
Tabela 3 - Classificação de estações totais
Classes de Estações Totais Desvio-padrão Precisão angular Desvio-padrão Precisão linear
1 - precisão baixa ≤ ± 30" ± (5 mm + 10 ppm * D)
2 - precisão média ≤ ± 07” ± (5 mm + 5 ppm * D)
3 - precisão alta ≤ ± 02” ± (3 mm + 3 ppm * D
Onde:
D = Distância medida em km.
Nota: ppm = parte por milhão.
Fonte: ABNT NBR 13.333, 1994, p.7.
Considerando as precisões especificadas na Tabela 1, as precisões proporcionadas pelos equipamentos e métodos
mencionados, o emprego de métodos convencionais de levantamento é recomendado para determinação de vértices de
classe igual ou inferior a
Estudo com base nos registros de compras de passagens aéreas permitiu identificar as variações na demanda por voos internacionais entre os anos de 2010 e 2011, representadas no mapa da Figura abaixo.
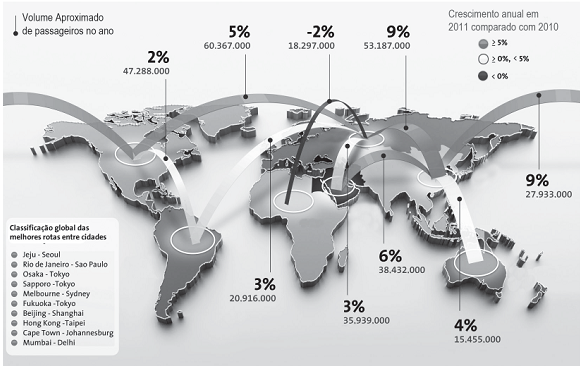
Disponível em: http://amadeus1a.com.br/tag/airconomy/. Acessado em: 2013. Adaptado.
Os elementos contidos na Figura permitem classificá-la como um mapa
Observe o relatório da estação 8112905, localizada no Rio de Janeiro, obtido no sítio do IBGE:
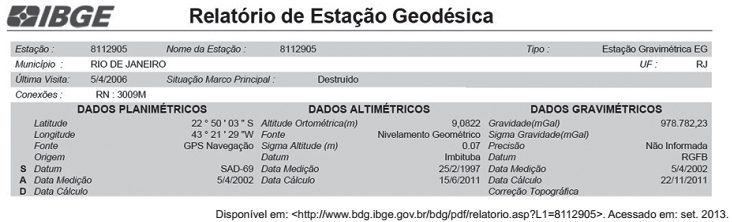
Considere que a redução de ar livre é dada pela expressão F = +0,3086H, e que o platô de Bouguer é AB = 0,1119H, e, para fins de cálculo, considere, também, que a altitude ortométrica é igual a 9,0 m.
Nessas condições, pelo processo de redução de Bouguer simplificada, a gravidade de Bouguer na Estação Gravimétrica
destruída vale, aproximadamente, em mGal,
Dentre as escalas de tempo que são importantes para o Sistema de Posicionamento Global (GPS), inclui-se o Tempo Universal Coordenado (UTC).
O UTC, a despeito de uma diferença de um número inteiro de segundos, concorda com o sistema de
A qualidade do resultado do posicionamento com receptores de uma frequência é afetada, principalmente, pela influência da ionosfera nos sinais GPS, que passou a ser a principal fonte de erro na navegação e no posicionamento com GPS, após a desativação da Disponibilidade Seletiva (SA).
Como o erro sistemático devido ao efeito da ionosfera é inversamente proporcional ao quadrado da frequência, uma forma de minimizá-lo é
O filtro de Kalman é um método recursivo que tem sido utilizado em certas aplicações, tais como o posicionamento cinemático por GPS e a navegação por sistema inercial. A modelagem funcional básica desse método é composta por duas equações matriciais, a das observações e a do modelo dinâmico:
Lb = A . X + V
X2 = T1/2 . X1 + W
Onde:
Lb é o vetor das observações;
A é a matriz dos coeficientes;
X é o vetor das variáveis aleatórias;
X1 é o vetor das variáveis aleatórias em um tempo t1 ;
X2 é o vetor das variáveis aleatórias em um tempo t2 ;
T1/2 é a matriz de transição do tempo t1 para o tempo t2 ;
V é o vetor de ruídos na equação das observações e
W é o vetor de ruídos na equação do modelo dinâmico.
Considerando que E(x), denota a esperança matemática de uma variável x, e Cov(x), a covariância de uma variável x, a afirmação:
Para que se possa aplicar o filtro de Kalman, uma das injunções iniciais é que haja independência estatística entre os ruídos da equação das observações e o modelo dinâmico.
significa que