Questões de Concurso Público UFRN 2018 para Engenheiro - Engenharia da Computação
Foram encontradas 49 questões
Analise o circuito representado na figura abaixo.
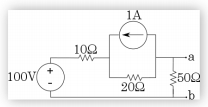
O valor da tensão entre os pontos “a” e “b” (Vab) é de
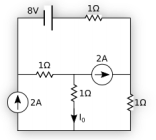
A figura ao lado representa um circuito contendo fontes de corrente e tensão.
A corrente I0 nesse circuito é:
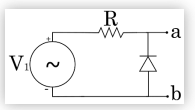
Sabendo que o diodo entra em condução com 0.8V e que Vab é a tensão entre os pontos “a” e “b”, analise o circuito representado na figura ao lado.
Em relação esse circuito, é correto afirmar:
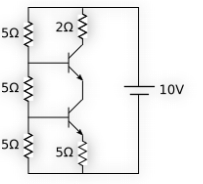
Dado o circuito ao lado, considerando que os transistores têm um valor de β muito alto e VBE=0,7 V, o valor da corrente em amperes no resistor de 2 Ω é
A figura abaixo mostra um circuito com amplificadores operacionais.
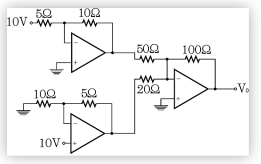
O valor de V0 nesse circuito é de
Em robótica, transformações homogêneas são usadas para representação de configurações, para mudar o sistema de referência e para deslocar um ponto ou sistema. Nesse contexto, considere as afirmações abaixo a respeito de transformações homogêneas.
I Satisfazem as propriedades associativa e comutativa.
II Podem ser representadas por uma matriz de transformação de dimensão 4x4.
III São compostas das operações de rotação e translação.
IV São compostas apenas de operações de translação.
Estão corretas as afirmações
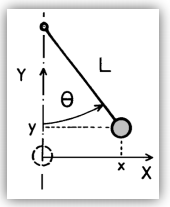
Para movimentar um manipulador robótico articulado para uma dada posição no espaço, é preciso encontrar uma sequência de deslocamentos angulares para suas articulações. Isso pode ser feito com a utilização da inversa da matriz jacobiana do manipulador, que representa as variações de posição do manipulador com relação aos ângulos das articulações. Considerando o manipulador ao lado, a matriz jacobiana desse manipulador está representada em