Questões de Concurso Público EMAE-SP 2018 para Engenheiro - Elétrica
Foram encontradas 5 questões
Q1032667
Engenharia Eletrônica
Considerando que se deseja converter uma tensão analógica que varia entre −12 V e +12 V com resolução de 25 mV, o número
de bits que o Conversor Analógico Digital (ADC) deve ter é de, no mínimo,
Q1032668
Engenharia Eletrônica
Pedro, engenheiro eletricista, foi incumbido de escolher um tipo de transistor de potência para ser utilizado no controle de um
motor de indução de uma bomba hidráulica. Considerando que os requisitos para a escolha são: comando simples e por tensão,
potência de 2 kW e baixa perda na comutação, o tipo de transistor de potência a ser escolhido é o
Q1032691
Engenharia Eletrônica
É característica ideal de um Amplificador Operacional, elemento/dispositivo eletrônico fundamental para diversas aplicações:
Q1032695
Engenharia Eletrônica
Um servomecanismo hidráulico de posicionamento possui uma entrada de tensão de comando VCMD que ajusta a distensão ou
retração de um pistão. Em regime permanente, para cada tensão VCMD aplicada, o pistão alcança um determinado deslocamento POS. Admitindo VCMD e POS dimensionados de forma percentual, desde 0,0 até 100,0 [%], o sistema dinâmico do
servomecanismo foi identificado, resultando na função de transferência no domínio da frequência complexa de Laplace:
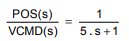
Nesse sistema, quando aplica-se um degrau de 0,0 a 100,0 [%]em VCMD, o tempo necessário para que o pistão alcance mais de 95,0% em sua posição POS é, em [s], de, aproximadamente,
Nesse sistema, quando aplica-se um degrau de 0,0 a 100,0 [%]em VCMD, o tempo necessário para que o pistão alcance mais de 95,0% em sua posição POS é, em [s], de, aproximadamente,
Q1032696
Engenharia Eletrônica
Um regulador de tensão de um hidrogerador síncrono opera ajustando a tensão de excitação de seu enrolamento de campo. A
respeito da tensão aplicada no enrolamento de campo e do seu efeito na tensão terminal do gerador, é correto afirmar que