Questões de Concurso Público IF-RS 2015 para Professor - Automação e Controle
Foram encontradas 30 questões
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541190
Engenharia de Automação
Os ângulos Roll-Pitch-Yaw (RPY) são usados como representação mínima de orientação. Em certas posturas de um corpo rígido, porém, podem ocorrer singularidades de representação, ou seja, não é possível obter um único conjunto de ângulos RPY a partir da matriz de rotação. A única alternativa de representação de orientação que NÃO apresenta esse problema é:
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541191
Engenharia de Automação
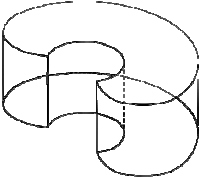
O robô manipulador que apresenta o volume de trabalho característico mostrado na figura abaixo pode ser cinematicamente classificado como:
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541192
Engenharia de Automação
Em relação às afirmativas abaixo sobre a definição de graus de liberdade de um manipulador.
I. Número de variáveis independentes necessárias para especificar completamente a configuração de uma cadeia cinemática em relação a uma referência.
II. Dimensão do espaço de configuração de um manipulador.
III. Número de juntas de um manipulador, serial ou paralelo.
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):
I. Número de variáveis independentes necessárias para especificar completamente a configuração de uma cadeia cinemática em relação a uma referência.
II. Dimensão do espaço de configuração de um manipulador.
III. Número de juntas de um manipulador, serial ou paralelo.
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541193
Engenharia de Automação
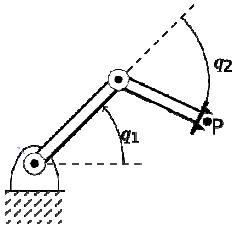
Seja o manipulador planar da figura abaixo, com duas juntas rotacionais, cujas posições são definidas pelas variáveis q1 e q2. O efetuador final está montado no elo 2, e sua posição é definida pelo ponto P. Em relação à cinemática desse manipulador, é INCORRETO afirmar:
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541194
Engenharia de Automação
Texto associado
Em relação às afirmativas abaixo, marque a alternativa correta:
I. Um robô com mais de seis graus de liberdade é intrinsecamente redundante, no que tange ao posicionamento com destreza do efetuador final no espaço 3D.
II. Robôs de cadeia fechada e paralelos são inerentemente redundantes.
III. Os manipuladores cinematicamente redundantes permitem infinitas soluções dasua cinemática inversa para uma postura particular do efetuador final.
IV. A redundância é um conceito relativo à tarefa definida para o manipulador final, ou seja, o mesmo manipulador pode ser redundante para determinada tarefa e não redundante para outra.
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541195
Engenharia de Automação
Em relação às afirmativas sobre o controle Proporcional-Derivativo (PD) com compensação da gravidade:
I. Sua estabilidade global em relação a uma postura de equilíbrio é provada através do método de Lyapunov.
II. A técnica pode ser empregada para controle tanto no espaço das juntas quanto no espaço operacional.
III. Ela é uma técnica de controle centralizado, que considera o manipulador como um sistema de múltiplas entradas e múltiplas saídas, dinamicamente acoplado.
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):
I. Sua estabilidade global em relação a uma postura de equilíbrio é provada através do método de Lyapunov.
II. A técnica pode ser empregada para controle tanto no espaço das juntas quanto no espaço operacional.
III. Ela é uma técnica de controle centralizado, que considera o manipulador como um sistema de múltiplas entradas e múltiplas saídas, dinamicamente acoplado.
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541196
Engenharia de Automação
Texto associado
Em relação à programação de robôs, assinale a única alternativa que apresenta uma correspondência correta de itens numerados em romano com itens em ordem alfabética:
I. Pode ser feita online.
II. É baseada em linguagens textuais.
III. Reduz o tempo de parada de produção.
IV. Pode conter lógicas complexas.
V. Utilizável apenas para operações de repetição de pontos.
A. Programação por demonstração/repetição.
B. Programação por linguagens de robôs.
C. Programação por linguagens de tarefas.
Conforme acima citado, segue abaixo.
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541197
Engenharia de Automação
Um dos problemas inerentes à autonomia em robótica móvel é a navegação em ambientes desconhecidos, que podem ter obstáculos e variar no tempo, a partir de uma posição inicial conhecida e com informações limitadas adquiridas por sensores. Marque a alternativa que corresponde à linha de pesquisa que estuda soluções para esse problema:
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541198
Engenharia de Automação
Texto associado
Leia as afirmativas expostas abaixo sobre a relação entre os tipos de instalação e layouts utilizados para diferentes níveis de quantidade produzida e variedade de produto:
I. Em caso de produtos grandes e pesados, onde a produção é feita por encomenda e onde há dificuldade de deslocamento, o layout de posição fixa é utilizado ao menos durante a montagem final e as peças individuais destes grandes produtos fazem uso do layout por produto.
II. A produção em quantidade envolve a produção em massa de peças individuais, e normalmente envolve máquinas-padrão que ficam dedicadas à produção de um tipo de peça. Neste tipo de produção a organização física típica é a do layout por processo.
III. O layout celular é utilizado quando a faixa de produção é média e quando a variedade de produto é leve, onde cada célula é especializada na produção de uma variedade limitada de configurações de peças.
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541199
Engenharia de Automação
Texto associado
Abaixo são apresentadas quatro características sobre os níveis de automação e controle na produção:
I. Compreende funções de controle que incluem a execução da sequência de etapas no programa de instruções e a certificação de que cada etapa foi adequadamente executada.
II. Compreende elementos sensores, atuadores e outros componentes de hardware, que são combinados em loops individuais de controle.
III. Compreende as funções necessárias ao gerenciamento da empresa, como marketing e vendas, contabilidade, projeto, pesquisa, planejamento agregado e plano mestre de produção.
IV. Consiste em um grupo de máquinas ou estações de trabalho conectadas e apoiadas por um computador ou outro equipamento apropriado ao processo de produção.
A alternativa que contém os respectivos níveis de automação de que tratam as características em sequência, de cima para baixo, é:
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541200
Engenharia de Automação
Texto associado
Abaixo são apresentadas três características de diferentes sistemas computadorizados de apoio à produção:
I. Uso abrangente dos sistemas computadorizados nas etapas de projeto do produto, planejamento da produção, controle das operações e execução de diferentes funções de processamento de informações presentes em uma empresa de produção.
II. Uso de sistemas computadorizados no apoio à função de projeto do produto.
III. Uso de sistemas computadorizados na execução de funções relacionadas à engenharia de manufatura.
As características acima se referem, respectivamente, a quais sistemas computadorizados, na ordem de cima para baixo?
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541201
Engenharia de Automação
Com relação à utilização de buffers de armazenamento em linhas de produção automatizadas, é INCORRETO afirmar que:
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541202
Engenharia de Automação
Texto associado
Com relação ao Sistema Digital de Controle Distribuído (SDCD) e ao Controlador Lógico Programável (CLP), verifique se as alternativas abaixo são CERTAS (C) ou ERRADAS (E):
( ) Um SDCD apresenta como benefícios a execução multitarefas em paralelo e redundância embutida.
( ) Um CLP é um controlador baseado em microprocessador que usa instruções guardadas na memória programável para implementar funções de lógica, sequenciamento, temporização, contagem e controle aritmético.
( ) Os CLPs atuais são usados tanto para aplicações de controle contínuo como para de controle discreto, tanto nas indústrias de processo como nas de produção discreta.
( ) O conceito de controle distribuído se aplica igualmente bem em CLPs, já que vários CLPs podem ser distribuídos pela fábrica para controlar equipamentos individuais, mas integrados por meio de uma rede de comunicação em comum.
A alternativa que contém a sequência de respostas corretas, na ordem de cima para baixo, é:
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541203
Engenharia de Automação
Em relação ao nível de flexibilidade dos sistemas flexíveis de manufatura (FMS), é CORRETO afirmar que:
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541204
Engenharia de Automação
Em relação às características das redes industriais Foundation Fieldbus, é INCORRETO afirmar que:
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541205
Engenharia de Automação
Texto associado
Em redes industriais ProfiBus são utilizados dois mecanismos de acesso ao meio, conhecidos como passagem de token e polling. Verifique se as alternativas abaixo são CERTAS (C) ou ERRADAS (E):
( ) O mecanismo de passagem de token é utilizado na comunicação entre múltiplos mestres presentes na rede.
( ) O mecanismo de polling é utilizado na comunicação entre os escravos presentes na rede.
( ) O mecanismo de polling é usado por um mestre que está com o token para se comunicar com os dispositivos escravos.
( ) O token é passado entre os mestres numa sequência descendente de endereços de dispositivos.
A alternativa que contém a sequência de respostas corretas, na ordem de cima para baixo, é:
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541206
Engenharia de Automação
Assinale a alternativa correta sobre as características da camada física utilizada nas redes industriais ProfiBus DP, que é baseada no padrão EIA-485:
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541207
Engenharia de Automação
Com base nas definições do protocolo Modbus sobre os campos de endereço, código de função, dados e verificação de erro contidos em uma mensagem enviada pelo mestre, é correto afirmar que:
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541208
Engenharia de Automação
No protocolo Modbus, um registrador tem um comprimento, em bits, de:
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541209
Engenharia de Automação
Texto associado
Leia as afirmativas expostas abaixo sobre as especificações da rede industrial DeviceNet:
I. Uma rede DeviceNet pode suportar até 32 dispositivos, que podem ser desconectados da rede quando alimentados sem afetar o funcionamento da mesma.
II. As taxas de dados definidas são de 125, 250 e 500 kbps.
III. Um quadro pode conter no máximo 8 bytes de dados.
IV. O quadro conta com o campo de identificação, que é utilizado como mecanismo de arbitração de acesso ao meio, caso dois dispositivos tentem enviar simultaneamente as suas mensagens.
II. As taxas de dados definidas são de 125, 250 e 500 kbps.
III. Um quadro pode conter no máximo 8 bytes de dados.
IV. O quadro conta com o campo de identificação, que é utilizado como mecanismo de arbitração de acesso ao meio, caso dois dispositivos tentem enviar simultaneamente as suas mensagens.
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):