Questões de Concurso Público IF-SP 2024 para Professor EBTT - Controle e Automação
Foram encontradas 5 questões
Um engenheiro de automação está desenvolvendo um sistema de controle para ajustar a temperatura de um forno industrial. Devido à complexidade das variações térmicas e às incertezas do processo, foi decidido utilizar um controlador fuzzy para otimizar o desempenho do sistema. Além disso, o engenheiro quer integrar técnicas de aprendizado de máquina para que o controlador possa se adaptar dinamicamente às condições do forno.
Com base nessa situação, qual das opções abaixo descreve corretamente uma vantagem da utilização de um controlador fuzzy adaptativo em comparação a um controlador fuzzy clássico?
Memórias são dispositivos utilizados para
armazenar informações tais como números, letras,
endereços e instruções em forma de sinais digitais
por períodos curtos ou longos. A grande vantagem
dos sistemas digitais sobre os analógicos é a habilidade de armazenar grandes quantidades de informações digitais. Embora distingam-se pela sua
operação interna, as memórias têm princípios básicos de operação comuns. Seja uma memória de
32 x 4 que armazena 32 palavras de 4 bits, quais
as condições em cada entrada e saída quando a palavra de dados 0111 estiver sendo escrita no endereço 01100?
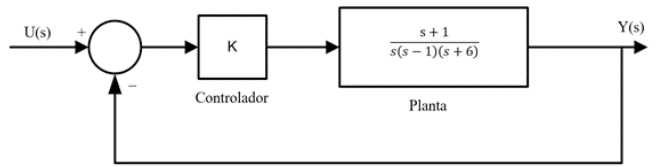
O diagrama de blocos a seguir representa uma planta de um motor de corrente contínua. Deseja-se
incluir um controlador que, ao adicionar um ganho, garante a estabilidade do sistema em malha fechada.
Determine a faixa de valores de ganho K, para que o sistema realimentado seja estável.
Fonte: IFSP, 2024
Considere um robô planar com duas juntas rotativas (RR), em que o comprimento do primeiro link é L1 e o comprimento do segundo link é L2. A cinemática direta relaciona os ângulos das juntas (θ1 e θ2) com a posição do efetuador final no plano XY. Qual é a equação da cinemática direta que descreve a posição (x, y) do efetuador final em termos dos ângulos das juntas e dos comprimentos dos links?
Um robô industrial é uma máquina programável de propósito geral que possui certas características antropomórficas, sendo o braço mecânico (ou manipulador) a característica antropomórfica mais óbvia. O manipulador, combinado com um controlador de alto nível, permite que um robô industrial realize várias tarefas como carregamento e descarregamento de máquinas e equipamentos, processo de soldagem e pintura pulverizada.
Em relação aos robôs industriais, pode-se afirmar
que: