Questões de Concurso Público IF-PR 2023 para Automação Industrial
Foram encontradas 35 questões
Ano: 2023
Banca:
UFPR
Órgão:
IF-PR
Provas:
UFPR - 2023 - IF-PR - Administração
|
UFPR - 2023 - IF-PR - Agronomia |
UFPR - 2023 - IF-PR - Automação Industrial |
UFPR - 2023 - IF-PR - Biologia |
UFPR - 2023 - IF-PR - Ciências Contábeis |
UFPR - 2023 - IF-PR - Comércio Exterior |
UFPR - 2023 - IF-PR - Economia |
UFPR - 2023 - IF-PR - Educação Física |
UFPR - 2023 - IF-PR - Engenharia Ambiental |
UFPR - 2023 - IF-PR - Engenharia de Materiais |
UFPR - 2023 - IF-PR - Engenharia Elétrica |
UFPR - 2023 - IF-PR - Engenharia Eletrônica |
UFPR - 2023 - IF-PR - Física |
UFPR - 2023 - IF-PR - Goegrafia |
UFPR - 2023 - IF-PR - Informática |
UFPR - 2023 - IF-PR - Letras Português |
UFPR - 2023 - IF-PR - Letras Portugês/Libras |
UFPR - 2023 - IF-PR - Letras Poruguês/Espanhol |
UFPR - 2023 - IF-PR - Letras Português/Inglês |
UFPR - 2023 - IF-PR - Redes de Computadores |
UFPR - 2023 - IF-PR - Zootecnia |
UFPR - 2023 - IF-PR - Química |
UFPR - 2023 - IF-PR - Prótese Dentária |
UFPR - 2023 - IF-PR - Enhenharia de Alimentos/Tecnoliga de Alimentos |
UFPR - 2023 - IF-PR - Matemática |
UFPR - 2023 - IF-PR - Médico Veterinário/Aquicultura |
UFPR - 2023 - IF-PR - Odontologia |
UFPR - 2023 - IF-PR - Produçao de Áudio e Vídeo |
UFPR - 2023 - IF-PR - Pedagogia |
Q2182362
Legislação Federal
Os desenhos curriculares dos Institutos Federais:
Ano: 2023
Banca:
UFPR
Órgão:
IF-PR
Provas:
UFPR - 2023 - IF-PR - Administração
|
UFPR - 2023 - IF-PR - Agronomia |
UFPR - 2023 - IF-PR - Automação Industrial |
UFPR - 2023 - IF-PR - Biologia |
UFPR - 2023 - IF-PR - Ciências Contábeis |
UFPR - 2023 - IF-PR - Comércio Exterior |
UFPR - 2023 - IF-PR - Economia |
UFPR - 2023 - IF-PR - Educação Física |
UFPR - 2023 - IF-PR - Engenharia Ambiental |
UFPR - 2023 - IF-PR - Engenharia de Materiais |
UFPR - 2023 - IF-PR - Engenharia Elétrica |
UFPR - 2023 - IF-PR - Engenharia Eletrônica |
UFPR - 2023 - IF-PR - Física |
UFPR - 2023 - IF-PR - Goegrafia |
UFPR - 2023 - IF-PR - Informática |
UFPR - 2023 - IF-PR - Letras Português |
UFPR - 2023 - IF-PR - Letras Portugês/Libras |
UFPR - 2023 - IF-PR - Letras Poruguês/Espanhol |
UFPR - 2023 - IF-PR - Letras Português/Inglês |
UFPR - 2023 - IF-PR - Redes de Computadores |
UFPR - 2023 - IF-PR - Zootecnia |
UFPR - 2023 - IF-PR - Química |
UFPR - 2023 - IF-PR - Prótese Dentária |
UFPR - 2023 - IF-PR - Enhenharia de Alimentos/Tecnoliga de Alimentos |
UFPR - 2023 - IF-PR - Matemática |
UFPR - 2023 - IF-PR - Médico Veterinário/Aquicultura |
UFPR - 2023 - IF-PR - Odontologia |
UFPR - 2023 - IF-PR - Produçao de Áudio e Vídeo |
UFPR - 2023 - IF-PR - Pedagogia |
Q2182363
Pedagogia
Nilo Peçanha foi declarado Patrono da Educação Profissional e Tecnológica em virtude do seu papel na criação:
Ano: 2023
Banca:
UFPR
Órgão:
IF-PR
Provas:
UFPR - 2023 - IF-PR - Administração
|
UFPR - 2023 - IF-PR - Agronomia |
UFPR - 2023 - IF-PR - Automação Industrial |
UFPR - 2023 - IF-PR - Biologia |
UFPR - 2023 - IF-PR - Ciências Contábeis |
UFPR - 2023 - IF-PR - Comércio Exterior |
UFPR - 2023 - IF-PR - Economia |
UFPR - 2023 - IF-PR - Educação Física |
UFPR - 2023 - IF-PR - Engenharia Ambiental |
UFPR - 2023 - IF-PR - Engenharia de Materiais |
UFPR - 2023 - IF-PR - Engenharia Elétrica |
UFPR - 2023 - IF-PR - Engenharia Eletrônica |
UFPR - 2023 - IF-PR - Física |
UFPR - 2023 - IF-PR - Goegrafia |
UFPR - 2023 - IF-PR - Informática |
UFPR - 2023 - IF-PR - Letras Português |
UFPR - 2023 - IF-PR - Letras Portugês/Libras |
UFPR - 2023 - IF-PR - Letras Poruguês/Espanhol |
UFPR - 2023 - IF-PR - Letras Português/Inglês |
UFPR - 2023 - IF-PR - Redes de Computadores |
UFPR - 2023 - IF-PR - Zootecnia |
UFPR - 2023 - IF-PR - Química |
UFPR - 2023 - IF-PR - Prótese Dentária |
UFPR - 2023 - IF-PR - Enhenharia de Alimentos/Tecnoliga de Alimentos |
UFPR - 2023 - IF-PR - Matemática |
UFPR - 2023 - IF-PR - Médico Veterinário/Aquicultura |
UFPR - 2023 - IF-PR - Odontologia |
UFPR - 2023 - IF-PR - Produçao de Áudio e Vídeo |
UFPR - 2023 - IF-PR - Pedagogia |
Q2182364
Pedagogia
Conforme as Diretrizes Curriculares Nacionais Gerais para a Educação Profissional e Tecnológica, entende-se por
competência profissional a capacidade pessoal de mobilizar, articular, integrar e __________ conhecimentos,
habilidades, atitudes, valores e emoções que permitam responder intencionalmente, com suficiente __________ e
consciência crítica, aos desafios do mundo do trabalho.
Com base nos princípios e objetivos da Educação Profissional e Tecnológica, assinale a alternativa cujos termos preenchem respectiva e corretamente as lacunas que aparecem no texto.
Com base nos princípios e objetivos da Educação Profissional e Tecnológica, assinale a alternativa cujos termos preenchem respectiva e corretamente as lacunas que aparecem no texto.
Ano: 2023
Banca:
UFPR
Órgão:
IF-PR
Provas:
UFPR - 2023 - IF-PR - Administração
|
UFPR - 2023 - IF-PR - Agronomia |
UFPR - 2023 - IF-PR - Automação Industrial |
UFPR - 2023 - IF-PR - Biologia |
UFPR - 2023 - IF-PR - Ciências Contábeis |
UFPR - 2023 - IF-PR - Comércio Exterior |
UFPR - 2023 - IF-PR - Economia |
UFPR - 2023 - IF-PR - Educação Física |
UFPR - 2023 - IF-PR - Engenharia Ambiental |
UFPR - 2023 - IF-PR - Engenharia de Materiais |
UFPR - 2023 - IF-PR - Engenharia Elétrica |
UFPR - 2023 - IF-PR - Engenharia Eletrônica |
UFPR - 2023 - IF-PR - Física |
UFPR - 2023 - IF-PR - Goegrafia |
UFPR - 2023 - IF-PR - Informática |
UFPR - 2023 - IF-PR - Letras Português |
UFPR - 2023 - IF-PR - Letras Portugês/Libras |
UFPR - 2023 - IF-PR - Letras Poruguês/Espanhol |
UFPR - 2023 - IF-PR - Letras Português/Inglês |
UFPR - 2023 - IF-PR - Redes de Computadores |
UFPR - 2023 - IF-PR - Zootecnia |
UFPR - 2023 - IF-PR - Química |
UFPR - 2023 - IF-PR - Prótese Dentária |
UFPR - 2023 - IF-PR - Enhenharia de Alimentos/Tecnoliga de Alimentos |
UFPR - 2023 - IF-PR - Matemática |
UFPR - 2023 - IF-PR - Médico Veterinário/Aquicultura |
UFPR - 2023 - IF-PR - Odontologia |
UFPR - 2023 - IF-PR - Produçao de Áudio e Vídeo |
UFPR - 2023 - IF-PR - Pedagogia |
Q2182365
Pedagogia
Uma didática voltada para a educação profissional deve ter como objetivo a ação modificadora e seu exercício social.
Nesse sentido, para efeitos da organização de estratégias didáticas alinhadas aos objetivos da Educação Profissional
e Tecnológica, deve-se partir de critérios que assumam o trabalho como princípio educativo, o fazer discente como
centro das atividades, a interação entre alunos e professores como propulsora da construção de saberes e:
Ano: 2023
Banca:
UFPR
Órgão:
IF-PR
Provas:
UFPR - 2023 - IF-PR - Administração
|
UFPR - 2023 - IF-PR - Agronomia |
UFPR - 2023 - IF-PR - Automação Industrial |
UFPR - 2023 - IF-PR - Biologia |
UFPR - 2023 - IF-PR - Ciências Contábeis |
UFPR - 2023 - IF-PR - Comércio Exterior |
UFPR - 2023 - IF-PR - Economia |
UFPR - 2023 - IF-PR - Educação Física |
UFPR - 2023 - IF-PR - Engenharia Ambiental |
UFPR - 2023 - IF-PR - Engenharia de Materiais |
UFPR - 2023 - IF-PR - Engenharia Elétrica |
UFPR - 2023 - IF-PR - Engenharia Eletrônica |
UFPR - 2023 - IF-PR - Física |
UFPR - 2023 - IF-PR - Goegrafia |
UFPR - 2023 - IF-PR - Informática |
UFPR - 2023 - IF-PR - Letras Português |
UFPR - 2023 - IF-PR - Letras Portugês/Libras |
UFPR - 2023 - IF-PR - Letras Poruguês/Espanhol |
UFPR - 2023 - IF-PR - Letras Português/Inglês |
UFPR - 2023 - IF-PR - Redes de Computadores |
UFPR - 2023 - IF-PR - Zootecnia |
UFPR - 2023 - IF-PR - Química |
UFPR - 2023 - IF-PR - Prótese Dentária |
UFPR - 2023 - IF-PR - Enhenharia de Alimentos/Tecnoliga de Alimentos |
UFPR - 2023 - IF-PR - Matemática |
UFPR - 2023 - IF-PR - Médico Veterinário/Aquicultura |
UFPR - 2023 - IF-PR - Odontologia |
UFPR - 2023 - IF-PR - Produçao de Áudio e Vídeo |
UFPR - 2023 - IF-PR - Pedagogia |
Q2182366
Pedagogia
A organização curricular dos Institutos Federais oferece para os profissionais da educação um espaço ímpar de
construção de saberes, com a possibilidade de diálogo simultâneo e articulado entre todos os níveis, desde a educação
básica até a pós-graduação, colocando a formação profissional como paradigma nuclear. Essa organização curricular
está alicerçada no princípio da:
Q2182387
Engenharia Elétrica
Um motor de indução trifásico (MIT) 220 V, 60 Hz, 6 polos, ligado em Y, possui os seguintes parâmetros elétricos
referentes ao circuito equivalente por fase, como pode ser visto na figura a seguir, em que:
R1 = 0,4 Ω X1 = 0,6 Ω R2 = 0,15 Ω X2 = 0,3 Ω Xmag = 15 Ω
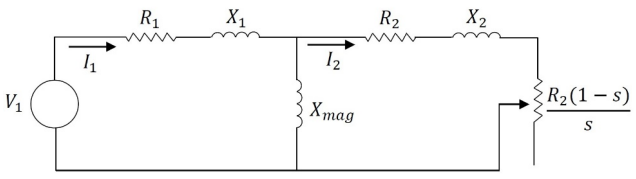
Em determinada aplicação, o MIT opera com 5% de escorregamento e I2 igual a 10 A. Considerando que as perdas totais de atrito, ventilação e rotacionais suplementares sejam de 120 W constantes, independentemente da carga, a potência de saída do motor é de aproximadamente:
R1 = 0,4 Ω X1 = 0,6 Ω R2 = 0,15 Ω X2 = 0,3 Ω Xmag = 15 Ω
Em determinada aplicação, o MIT opera com 5% de escorregamento e I2 igual a 10 A. Considerando que as perdas totais de atrito, ventilação e rotacionais suplementares sejam de 120 W constantes, independentemente da carga, a potência de saída do motor é de aproximadamente:
Q2182388
Engenharia Mecânica
Qual das seguintes alternativas descreve uma desvantagem do uso de automação eletropneumática em
processos industriais?
Q2182389
Engenharia de Automação
Bobinas virtuais, também conhecidas como marcadores, são um importante recurso disponível em diversos
controladores lógicos programáveis. O diagrama Ladder a seguir ilustra a aplicação de uma delas, identificada
como M01. Neste diagrama, letras minúsculas e maiúsculas são utilizadas para diferenciar contatos normalmente
abertos de contatos normalmente fechados. 
Sabendo que x02 representa uma chave que ativa o desligamento de emergência da carga conectada na saída Q01 e interpretando o programa ilustrado acima, pode-se afirmar que a bobina virtual é utilizada nesse caso para:
Sabendo que x02 representa uma chave que ativa o desligamento de emergência da carga conectada na saída Q01 e interpretando o programa ilustrado acima, pode-se afirmar que a bobina virtual é utilizada nesse caso para:
Q2182390
Engenharia de Automação
Automação de sistemas industriais pode ser obtida com a utilização de dispositivos para acionamentos
eletromecânicos.
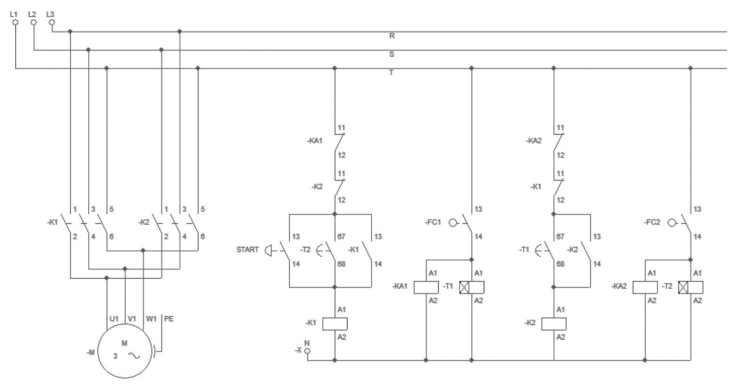
Interpretando os diagramas de comando e força acima, pode-se entender que o sistema foi concebido para:
Interpretando os diagramas de comando e força acima, pode-se entender que o sistema foi concebido para:
Q2182391
Engenharia de Automação
Em relação às redes industriais PROFIBUS DP e PROFINET, pode-se afirmar que:
Q2182392
Engenharia de Automação
Controladores PID possuem ação proporcional, integral e derivativa. São frequentemente utilizados em sistemas de
automação de processos industriais. Em essência, controladores industriais comparam uma variável de saída em
relação a uma referência previamente definida. Diferenças entre elas alimentam o controlador, que busca igualá-las.
No contexto de controladores industriais PID, é correto afirmar:
Q2182393
Engenharia de Automação
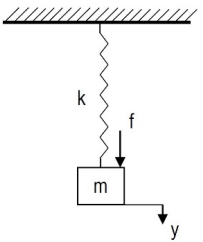
Considere o sistema mecânico da figura ao lado. O deslocamento vertical y da
massa m é a saída do sistema. Esse deslocamento é medido a partir da posição
de equilíbrio do sistema, ou seja, kδ = mg, em que δ é a deflexão estática da
mola (quando a massa é pendurada na mola), k é a constante de elasticidade da
mola, e g é a aceleração da gravidade. O sistema encontra-se em repouso
para t < 0. Em t = 0, uma força externa f é aplicada ao sistema.
Assinale a alternativa que contém a função de transferência do sistema.
Assinale a alternativa que contém a função de transferência do sistema.
Q2182394
Engenharia de Automação
Considere o diagrama de blocos da figura a seguir.
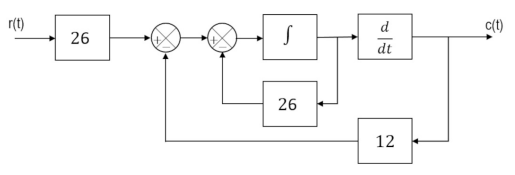
A função de transferência C(s) / R(s) do sistema representado por esse diagrama é dada por:
Q2182395
Engenharia de Automação
Qual é a principal diferença entre um sistema SCADA e um sistema PIMS em um ambiente industrial?
Q2182396
Engenharia de Automação
Qual é a função de um atuador em um robô?