onde pi e ci representam, respectivamente, os polos do sist...
Próximas questões
Com base no mesmo assunto
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
SEGESP-AL
Prova:
CESPE - 2013 - SEGESP-AL - Perito Criminal - Engenharia |
Q458455
Engenharia Eletrônica
Texto associado
Uma abordagem moderna da teoria de controle representa sistemas dinâmicos em termos de variáveis de estados. Nessa representação, os sistemas dinâmicos são descritos por meio de um conjunto de equações diferenciais de primeira ordem acoplado a um conjunto de variáveis internas, chamadas de variáveis de estado. Um conjunto de equações algébricas relacionando as variáveis de estado às saídas físicas do sistema completa a descrição. Uma das representações possíveis por variáveis de estado para sistemas com polos diferentes, conhecida como forma canônica diagonal, é dada pelo seguinte conjunto de equações:

onde pi e ci representam, respectivamente, os polos do sistema e as amplitudes associadas aos polos. Nesse conjunto de equações, u denota a entrada do sistema e y é a saída correspondente. Com relação à descrição de sistemas dinâmicos lineares por variáveis de estado, julgue os itens a seguir.
A representação na forma canônica diagonal de um sistema com função de transferência é dada por
é dada por
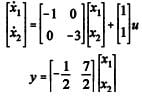
A representação na forma canônica diagonal de um sistema com função de transferência
é dada por Comentários
Veja os comentários dos nossos alunos
tudo perfeito, agora se os polos são negativos (-3 e -1) e na definição é mostrando "-p" por que ele coloca um valor negativo e não positivo? -(-3) = +3
Basta fazer: G(s) = C (sI-A)^-1 B + D
Clique para visualizar este comentário
Visualize os comentários desta questão clicando no botão abaixo