Um sistema de controle linear e contínuo, com realimentação ...
Próximas questões
Com base no mesmo assunto
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobras - Engenheiro de Equipamento Júnior - Eletrônica - 2011 |
Q431905
Engenharia Eletrônica
Um sistema de controle linear e contínuo, com realimentação de saída, apresenta uma estrutura de compensação na malha direta, em série com a planta, cuja função de transferência é 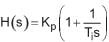
Esse compensador é do tipo
Esse compensador é do tipo
Comentários
Veja os comentários dos nossos alunos
As funções de transferência de controle são:
PID => Kp(1 + 1/(Tis) + Tds)
PI => Kp(1 + 1/(Tis))
Res: B
Clique para visualizar este comentário
Visualize os comentários desta questão clicando no botão abaixo