Questões de Concurso Sobre controladores (proporcional, pi e pid) em engenharia eletrônica
Foram encontradas 147 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224284
Engenharia Eletrônica
Para ajustar os parâmetros de um sistema de controle em malha fechada com
retroalimentação unitária do tipo PID, um engenheiro assumiu inicialmente somente a presença de
uma ação proporcional. Em seguida, ele variou o ganho proporcional de 0 até um valor Kc no qual era
possível observar que a saída atingia uma oscilação sustentada, ou seja, o sistema equivalente tinha
se tornado marginalmente estável. A partir de Kc e do período do sinal de saída, o engenheiro pôde
determinar os parâmetros do PID através de uma tabela. Nesse caso, o método de sintonia do PID
utilizado pelo engenheiro foi o método:
Ano: 2023
Banca:
IF-MG
Órgão:
IF-MG
Prova:
IF-MG - 2023 - IF-MG - Professor EBTT Área/Disciplina: Controle e Automação |
Q2171373
Engenharia Eletrônica
Dadas a implementação eletrônica de controladores e as possíveis respostas típicas dos elementos básicos de
controlador PID a entradas determinadas,
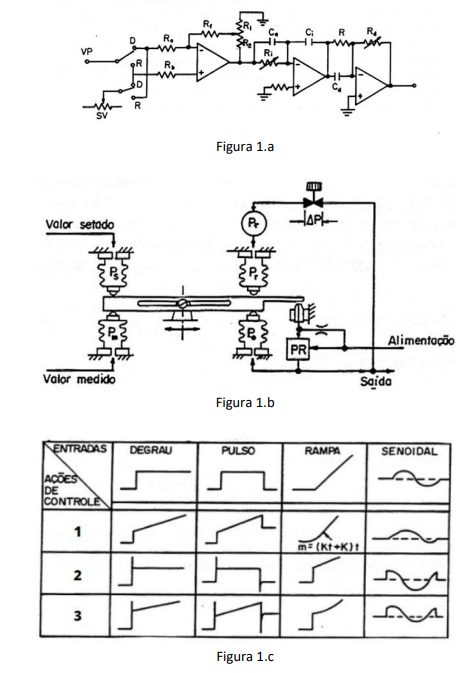
analise as seguintes afirmativas.
I. A implementação pneumática (Figura 1.b) é do controlador PID.
II. As implementações apresentadas (Figuras 1.a e 1.b) representam o mesmo controlador.
III. As respostas 3), 1) e 2) (Figura 1.c) são devidas às ações proporcional, proporcional-integral-derivativa e proporcional-integral.
IV. Nas respostas 1), 2) e 3) (Figura 1.c) não há ação derivativa.
V. A ação 2) (Figura 1.c) corresponde à ação proporcional-derivativa.
VI. A ação que corresponde à implementação pneumática (Figura 1.b) é ação 1) (Figura 1.c).
São corretas as afirmativas:
analise as seguintes afirmativas.
I. A implementação pneumática (Figura 1.b) é do controlador PID.
II. As implementações apresentadas (Figuras 1.a e 1.b) representam o mesmo controlador.
III. As respostas 3), 1) e 2) (Figura 1.c) são devidas às ações proporcional, proporcional-integral-derivativa e proporcional-integral.
IV. Nas respostas 1), 2) e 3) (Figura 1.c) não há ação derivativa.
V. A ação 2) (Figura 1.c) corresponde à ação proporcional-derivativa.
VI. A ação que corresponde à implementação pneumática (Figura 1.b) é ação 1) (Figura 1.c).
São corretas as afirmativas:
Ano: 2022
Banca:
Instituto Consulplan
Órgão:
SEED-PR
Prova:
Instituto Consulplan - 2022 - SEED-PR - Eixo Tecnológico: Controle e Processos Industriais |
Q2112155
Engenharia Eletrônica
Analise a imagem e considere: Gc1 e Gc2 controladores PID e autovalores reais e distinto.
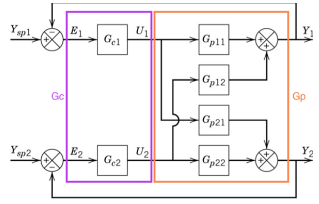
Para facilitar o ajuste dos controladores PID é necessário projetar uma realimentação de estados por alocação de polos, de forma que o sistema dinâmico equivalente no espaço de estados esteja na forma canônica:
Ano: 2022
Banca:
Instituto Consulplan
Órgão:
SEED-PR
Prova:
Instituto Consulplan - 2022 - SEED-PR - Eixo Tecnológico: Controle e Processos Industriais |
Q2112144
Engenharia Eletrônica
Sobre sintonia de controladores PID, marque V para as afirmativas verdadeiras e F para as falsas.
( ) Na prática, na maioria dos casos, deve-se buscar uma sintonia mais robusta para malhas de controle; portanto, aquelas obtidas para um degrau no setpoint costumam ser mais indicadas de modo geral.
( ) A ação derivativa do controlador PID é mais indicada para processos ruidosos.
( ) O controlador PID é mais indicado para ser utilizado em processos em que a razão de controlabilidade (ou incontrolabilidade para alguns autores) é maior do que 1.
( ) O método de sintonia de Cohen e Coon é mais indicado para processos com atraso de transporte (tempo morto) mais elevado.
( ) O modelo mais utilizado para métodos clássicos de sintonia de controladores PID é baseado no modelo de primeira ordem mais atraso de transporte (tempo morto).
A sequência correta está em
( ) Na prática, na maioria dos casos, deve-se buscar uma sintonia mais robusta para malhas de controle; portanto, aquelas obtidas para um degrau no setpoint costumam ser mais indicadas de modo geral.
( ) A ação derivativa do controlador PID é mais indicada para processos ruidosos.
( ) O controlador PID é mais indicado para ser utilizado em processos em que a razão de controlabilidade (ou incontrolabilidade para alguns autores) é maior do que 1.
( ) O método de sintonia de Cohen e Coon é mais indicado para processos com atraso de transporte (tempo morto) mais elevado.
( ) O modelo mais utilizado para métodos clássicos de sintonia de controladores PID é baseado no modelo de primeira ordem mais atraso de transporte (tempo morto).
A sequência correta está em
Q1755035
Engenharia Eletrônica
O tipo de controle no qual a saída é um sinal K vezes maior do que a entrada e que os limites superior e inferior ao serem atingidos (saturação do sistema) são controlados, mas sem rejeitar completamente distúrbios e erros, é o controle