Questões de Concurso
Para ufsc
Foram encontradas 2.165 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Ano: 2023
Banca:
UFSC
Órgão:
UFSC
Provas:
UFSC - 2023 - UFSC - Técnico de Tecnologia da Informação
|
UFSC - 2023 - UFSC - Assistente em Administração |
UFSC - 2023 - UFSC - Técnico de Laboratório/Biologia |
UFSC - 2023 - UFSC - Técnico de Laboratório/Física |
Q2166979
Português
Texto associado
Texto 2
Cinco atitudes sustentáveis para combater o aquecimento global
Inspire-se com cinco hábitos simples que vão fazer bem para o planeta e para você
INSTITUTO BRASILEIRO DE DEFESA DO CONSUMIDOR. 18 de setembro de 2019; atualizado em 16 de janeiro de 2020.
Disponível em: https://idec.org.br/dicas-e-direitos/5-atitudes-simples-para-combater-o-aquecimento-global. [Adaptado].
Acesso em: 18 jan. 2023.
Com base no texto 2, assinale a alternativa correta.
Ano: 2023
Banca:
UFSC
Órgão:
UFSC
Provas:
UFSC - 2023 - UFSC - Técnico de Tecnologia da Informação
|
UFSC - 2023 - UFSC - Assistente em Administração |
UFSC - 2023 - UFSC - Técnico de Laboratório/Biologia |
UFSC - 2023 - UFSC - Técnico de Laboratório/Física |
Q2166978
Português
Texto associado
Texto 1
As mudanças climáticas
WWF. As mudanças climáticas. Disponível em: https://www.wwf.org.br/natureza_brasileira/reducao_de_
impactos2/clima/mudancas_climaticas2. [Adaptado]. Acesso em: 18 jan. 2023.
Com base no texto 1 e na variedade padrão da língua escrita, considere as seguintes afirmativas e
assinale a alternativa correta.
I. O uso do verbo “poder” em “podendo ocasionar o desaparecimento de ilhas e cidades” (linhas 18 e 19) expressa certeza dos cientistas quanto à concretização do evento.
II. Em “o aumento da temperatura média do planeta tem elevado o nível do mar” (linhas 13 e 14), a substituição da forma verbal sublinhada por “elevou” não altera o significado da frase.
III. O pronome sublinhado em “Isso se deve principalmente ao aumento [...]” (linha 03) retoma toda a informação do período precedente.
IV. A palavra sublinhada em “uma camada de gases que cobre a superfície da Terra” (linhas 06 e 07) é um pronome relativo cujo antecedente é “camada de gases”.
V. Os parênteses em “(tempestades [...] tsunamis)” (linhas 16 e 17) são usados para intercalar uma enumeração de elementos que exemplificam o conteúdo do termo precedente.
I. O uso do verbo “poder” em “podendo ocasionar o desaparecimento de ilhas e cidades” (linhas 18 e 19) expressa certeza dos cientistas quanto à concretização do evento.
II. Em “o aumento da temperatura média do planeta tem elevado o nível do mar” (linhas 13 e 14), a substituição da forma verbal sublinhada por “elevou” não altera o significado da frase.
III. O pronome sublinhado em “Isso se deve principalmente ao aumento [...]” (linha 03) retoma toda a informação do período precedente.
IV. A palavra sublinhada em “uma camada de gases que cobre a superfície da Terra” (linhas 06 e 07) é um pronome relativo cujo antecedente é “camada de gases”.
V. Os parênteses em “(tempestades [...] tsunamis)” (linhas 16 e 17) são usados para intercalar uma enumeração de elementos que exemplificam o conteúdo do termo precedente.
Ano: 2023
Banca:
UFSC
Órgão:
UFSC
Provas:
UFSC - 2023 - UFSC - Técnico de Tecnologia da Informação
|
UFSC - 2023 - UFSC - Assistente em Administração |
UFSC - 2023 - UFSC - Técnico de Laboratório/Biologia |
UFSC - 2023 - UFSC - Técnico de Laboratório/Física |
Q2166977
Português
Texto associado
Texto 1
As mudanças climáticas
WWF. As mudanças climáticas. Disponível em: https://www.wwf.org.br/natureza_brasileira/reducao_de_
impactos2/clima/mudancas_climaticas2. [Adaptado]. Acesso em: 18 jan. 2023.
Com base no trecho abaixo, retirado do texto 1, e na variedade padrão da língua escrita, indique
se as afirmativas são verdadeiras (V) ou falsas (F) e assinale a alternativa com a sequência
correta de cima para baixo.
“Essa camada, composta principalmente por gás carbônico (CO2), metano (CH4), óxido nitroso (N2O) e vapor d’água, é um fenômeno natural fundamental para a manutenção da vida na Terra, pois sem ela o planeta poderia se tornar muito frio, inviabilizando a sobrevivência de diversas espécies.” (linhas 07 a 10)
( ) A palavra “Terra” está grafada com inicial maiúscula por nomear um planeta.
( ) O trecho de “composta principalmente” até “vapor d’água” funciona como aposto explicativo que detalha o conteúdo do termo “camada”.
( ) A forma verbal “é” poderia ser grafada como “são”, pois, nesse caso, trata-se de uma regra de concordância verbal facultativa.
( ) O pronome “ela” refere-se a “vida na Terra”.
( ) A palavra “pois” introduz uma conclusão em relação à afirmação precedente.
“Essa camada, composta principalmente por gás carbônico (CO2), metano (CH4), óxido nitroso (N2O) e vapor d’água, é um fenômeno natural fundamental para a manutenção da vida na Terra, pois sem ela o planeta poderia se tornar muito frio, inviabilizando a sobrevivência de diversas espécies.” (linhas 07 a 10)
( ) A palavra “Terra” está grafada com inicial maiúscula por nomear um planeta.
( ) O trecho de “composta principalmente” até “vapor d’água” funciona como aposto explicativo que detalha o conteúdo do termo “camada”.
( ) A forma verbal “é” poderia ser grafada como “são”, pois, nesse caso, trata-se de uma regra de concordância verbal facultativa.
( ) O pronome “ela” refere-se a “vida na Terra”.
( ) A palavra “pois” introduz uma conclusão em relação à afirmação precedente.
Ano: 2023
Banca:
UFSC
Órgão:
UFSC
Provas:
UFSC - 2023 - UFSC - Técnico de Tecnologia da Informação
|
UFSC - 2023 - UFSC - Assistente em Administração |
UFSC - 2023 - UFSC - Técnico de Laboratório/Biologia |
UFSC - 2023 - UFSC - Técnico de Laboratório/Física |
Q2166976
Português
Texto associado
Texto 1
As mudanças climáticas
WWF. As mudanças climáticas. Disponível em: https://www.wwf.org.br/natureza_brasileira/reducao_de_
impactos2/clima/mudancas_climaticas2. [Adaptado]. Acesso em: 18 jan. 2023.
Com base no texto 1, associe a coluna A à coluna B e indique a alternativa com a numeração
correta de cima para baixo.
A 1. Causas do aquecimento global e de mudanças climáticas 2. Consequências do aquecimento global 3. O que é efeito estufa 4. O que é aquecimento global
B ( ) Aumento da temperatura média dos oceanos e da camada de ar próxima à superfície da Terra.
( ) Queima de combustíveis fósseis, conversão do uso do solo, agropecuária, descarte de lixo e desmatamento.
( ) Camada de gases composta por gás carbônico, metano, óxido nitroso e vapor d’água que cobre a superfície da Terra.
( ) Elevação do nível do mar, com possível desaparecimento de ilhas e cidades litorâneas.
( ) Alterações na radiação solar e dos movimentos orbitais da Terra.
A 1. Causas do aquecimento global e de mudanças climáticas 2. Consequências do aquecimento global 3. O que é efeito estufa 4. O que é aquecimento global
B ( ) Aumento da temperatura média dos oceanos e da camada de ar próxima à superfície da Terra.
( ) Queima de combustíveis fósseis, conversão do uso do solo, agropecuária, descarte de lixo e desmatamento.
( ) Camada de gases composta por gás carbônico, metano, óxido nitroso e vapor d’água que cobre a superfície da Terra.
( ) Elevação do nível do mar, com possível desaparecimento de ilhas e cidades litorâneas.
( ) Alterações na radiação solar e dos movimentos orbitais da Terra.
Ano: 2023
Banca:
UFSC
Órgão:
UFSC
Provas:
UFSC - 2023 - UFSC - Técnico de Tecnologia da Informação
|
UFSC - 2023 - UFSC - Assistente em Administração |
UFSC - 2023 - UFSC - Técnico de Laboratório/Biologia |
UFSC - 2023 - UFSC - Técnico de Laboratório/Física |
Q2166975
Português
Texto associado
Texto 1
As mudanças climáticas
WWF. As mudanças climáticas. Disponível em: https://www.wwf.org.br/natureza_brasileira/reducao_de_
impactos2/clima/mudancas_climaticas2. [Adaptado]. Acesso em: 18 jan. 2023.
Com base no texto 1, assinale a alternativa correta.
Q2166834
Mecatrônica
A figura abaixo apresenta um robô definido no espaço plano com cadeia cinemática do tipo RRP,
sendo que R representa uma junta de revolução e P representa uma junta do tipo prismática.
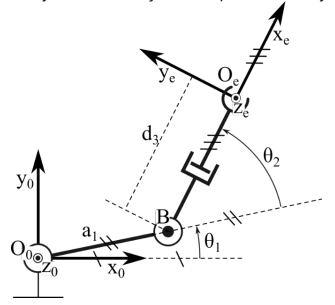
O robô RRP possui como base de referência o sistema de coordenadas O0–x0y0z0 e o sistema de coordenadas Oe–xeyeze fixo no elo do efetuador. A primeira junta de revolução tem seu eixo de rotação na direção e sentido do eixo z0 (perpendicular aos eixos x0 e y0, ou seja, saindo da página) passando pela origem do sistema de coordenadas da base em O0, com deslocamento de junta definido pelo ângulo θ1, medido entre o eixo x0 e a reta definida pelos pontos O0 e B, sobre o elo a1. A segunda junta de revolução tem eixo de rotação paralelo ao eixo da primeira junta de revolução, ou seja, na direção e sentido de z0, mas passando pelo ponto B, com deslocamento de junta definido pelo ângulo θ2, medido entre a reta definida entre os pontos O0 e B (alongamento tracejado na figura) e a reta definida entre os pontos B e a origem Oe. A terceira junta prismática tem seu eixo na direção e sentido do eixo xe (eixo x do sistema de coordenadas do efetuador) definido pela relação
xe = Oe − B / ‖Oe − B‖
passando pelo ponto B, com deslocamento d3, correspondente à distância entre os pontos B e Oe. Com respeito ao robô RRP, indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e assinale a alternativa com a sequência correta de cima para baixo.
( ) Não é possível gerar movimento de deslocamento para o efetuador do robô RRP na direção de z0. ( ) O robô RRP possui quatro graus de mobilidade. ( ) O volume de trabalho do robô RRP é cilíndrico. ( ) O robô RRP não possui singularidades.
O robô RRP possui como base de referência o sistema de coordenadas O0–x0y0z0 e o sistema de coordenadas Oe–xeyeze fixo no elo do efetuador. A primeira junta de revolução tem seu eixo de rotação na direção e sentido do eixo z0 (perpendicular aos eixos x0 e y0, ou seja, saindo da página) passando pela origem do sistema de coordenadas da base em O0, com deslocamento de junta definido pelo ângulo θ1, medido entre o eixo x0 e a reta definida pelos pontos O0 e B, sobre o elo a1. A segunda junta de revolução tem eixo de rotação paralelo ao eixo da primeira junta de revolução, ou seja, na direção e sentido de z0, mas passando pelo ponto B, com deslocamento de junta definido pelo ângulo θ2, medido entre a reta definida entre os pontos O0 e B (alongamento tracejado na figura) e a reta definida entre os pontos B e a origem Oe. A terceira junta prismática tem seu eixo na direção e sentido do eixo xe (eixo x do sistema de coordenadas do efetuador) definido pela relação
xe = Oe − B / ‖Oe − B‖
passando pelo ponto B, com deslocamento d3, correspondente à distância entre os pontos B e Oe. Com respeito ao robô RRP, indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e assinale a alternativa com a sequência correta de cima para baixo.
( ) Não é possível gerar movimento de deslocamento para o efetuador do robô RRP na direção de z0. ( ) O robô RRP possui quatro graus de mobilidade. ( ) O volume de trabalho do robô RRP é cilíndrico. ( ) O robô RRP não possui singularidades.
Q2166833
Mecatrônica
Entre os vários aspectos a serem considerados na especificação de um robô, é importante definir o
seu número de graus de liberdade. Com relação a esse assunto, é correto afirmar que:
Q2166832
Mecatrônica
CAPP (planejamento de processo auxiliado por computador, do inglês Computer-Aided Process
Planning) e CAM (manufatura auxiliada por computador, do inglês Computer-Aided Manufacturing)
consistem no planejamento e na preparação das instruções de operação detalhadas para
transformar um desenho de engenharia em produto final. Com relação ao CAPP e ao CAM,
indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e assinale a alternativa com a
sequência correta de cima para baixo.
( ) O CAPP tem por base três formas de planejamento do trabalho: variante, automático e generativo.
( ) O CAPP tem as seguintes etapas básicas: sequenciamento de operações; determinação do maquinário e ferramentas aplicáveis; lubrificação de peças; definição das condições de processo e respectivos tempos de fabricação.
( ) O CAM pode ser classificado em duas grandes categorias, de acordo com o sistema computacional: sistemas computadorizados de controle e monitoração e sistemas de suporte da produção.
( ) Sistemas como MRP e programação CNC são exemplos de CAM.
( ) Na forma variante de CAPP, as peças são classificadas de acordo com semelhanças de caráter geométrico ou de utilidade.
( ) O CAPP tem por base três formas de planejamento do trabalho: variante, automático e generativo.
( ) O CAPP tem as seguintes etapas básicas: sequenciamento de operações; determinação do maquinário e ferramentas aplicáveis; lubrificação de peças; definição das condições de processo e respectivos tempos de fabricação.
( ) O CAM pode ser classificado em duas grandes categorias, de acordo com o sistema computacional: sistemas computadorizados de controle e monitoração e sistemas de suporte da produção.
( ) Sistemas como MRP e programação CNC são exemplos de CAM.
( ) Na forma variante de CAPP, as peças são classificadas de acordo com semelhanças de caráter geométrico ou de utilidade.
Q2166831
Mecatrônica
Considerando os vários processos de fabricação existentes e suas respectivas características e
aplicações, indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e assinale a
alternativa com a sequência correta de cima para baixo.
( ) No processo de conformação mecânica por calandragem predominam os esforços de flexão quando comparado aos processos de forjamento e laminação.
( ) Existem três processos de fabricação para a união permanente de materiais: colagem, brasagem e soldagem.
( ) No processo de soldagem MIG, o gás de proteção participa de alterações metalúrgicas da poça de fusão.
( ) Furação não é um tipo de usinagem.
( ) No processo de conformação mecânica por calandragem predominam os esforços de flexão quando comparado aos processos de forjamento e laminação.
( ) Existem três processos de fabricação para a união permanente de materiais: colagem, brasagem e soldagem.
( ) No processo de soldagem MIG, o gás de proteção participa de alterações metalúrgicas da poça de fusão.
( ) Furação não é um tipo de usinagem.
Q2166830
Mecatrônica
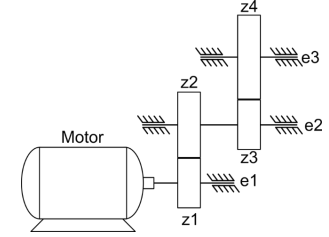
O esquema mecânico abaixo apresenta um motor elétrico e quatro engrenagens. No eixo e1 do
motor, encontra-se montada a primeira engrenagem, com número de dentes z1 = 18. A primeira
engrenagem está acoplada a uma segunda engrenagem, montada no eixo e2, com número de
dentes z2 = 36. No mesmo eixo e2, também está montada uma terceira engrenagem, com número
de dentes z3 = 14. A terceira engrenagem está acoplada a uma quarta engrenagem montada no
eixo e3, com número de dentes z4 = 56. Considere que os eixos e1, e2 e e3 são perfeitamente
paralelos e não sofrem atritos em seus mancais de montagem. Seja a velocidade angular de
rotação de saída do motor sobre o eixo e1 definida como ω1 e as velocidades angulares sobre os
eixos e2 e e3 definidas por ω2 e ω3, respectivamente. Também considere o torque de saída do
motor sobre o eixo e1 definido como T1 e os torques resultantes nos eixos e2 e e3 definidos,
respectivamente, por T2 e T3.
Considere as seguintes equações de acoplamento de duas engrenagens:
a) i = zs/ze ; b) ωe/ωs = i ; c) Te/Ts = 1/i ;
onde i é a relação de transmissão, zs é o número de dentes da engrenagem de saída, ze é o número de dentes da engrenagem de entrada, ωs é a velocidade angular na engrenagem de saída, ωe é a velocidade angular da engrenagem de entrada, Ts é o torque sobre o eixo da engrenagem de saída e Te é o torque sobre o eixo da engrenagem de entrada.
Para um dado valor de velocidade angular ω1 e torque T1 gerados pelo motor sobre e1, indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e assinale a alternativa com a sequência correta de cima para baixo.
( ) A velocidade angular resultante sobre e2 é a metade da velocidade angular sobre e1. ( ) A velocidade angular sobre e3 é 1/2 da velocidade angular sobre o eixo e2. ( ) O torque sobre o eixo e3 é duas vezes maior do torque sobre eixo e2. ( ) A relação de transmissão entre os eixos e3 e e1 é i = 4. ( ) Ao diminuir o número de dentes da primeira engrenagem para z1 = 12, a relação de transmissão entre os eixos e1 e e3 é amplificada para 12.
Considere as seguintes equações de acoplamento de duas engrenagens:
a) i = zs/ze ; b) ωe/ωs = i ; c) Te/Ts = 1/i ;
onde i é a relação de transmissão, zs é o número de dentes da engrenagem de saída, ze é o número de dentes da engrenagem de entrada, ωs é a velocidade angular na engrenagem de saída, ωe é a velocidade angular da engrenagem de entrada, Ts é o torque sobre o eixo da engrenagem de saída e Te é o torque sobre o eixo da engrenagem de entrada.
Para um dado valor de velocidade angular ω1 e torque T1 gerados pelo motor sobre e1, indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e assinale a alternativa com a sequência correta de cima para baixo.
( ) A velocidade angular resultante sobre e2 é a metade da velocidade angular sobre e1. ( ) A velocidade angular sobre e3 é 1/2 da velocidade angular sobre o eixo e2. ( ) O torque sobre o eixo e3 é duas vezes maior do torque sobre eixo e2. ( ) A relação de transmissão entre os eixos e3 e e1 é i = 4. ( ) Ao diminuir o número de dentes da primeira engrenagem para z1 = 12, a relação de transmissão entre os eixos e1 e e3 é amplificada para 12.
Q2166829
Mecatrônica
Nas juntas rebitadas, a tensão de cisalhamento nos rebites é definida por Tc= Q/A ≤ Td , onde Tc é a
tensão de cisalhamento que o rebite sofre devido à carga de cisalhamento Q, A é a área da
secção transversal do rebite e Td é a tensão admissível do material do rebite ao cisalhamento. A
esse respeito, indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e assinale a
alternativa com a sequência correta de cima para baixo.
( ) Se a área A do rebite aumentar e a carga Q permanecer constante, a tensão admissível do material diminui.
( ) Se a área A do rebite diminuir e a carga Q permanecer constante, a tensão admissível do material diminui.
( ) A área do rebite varia proporcionalmente com a carga aplicada para que a tensão devido ao carregamento seja constante.
( ) Numa dada situação, ao ser trocado o rebite por outro rebite com material mais resistente e a carga permanecer constante, a área projetada do rebite pode diminuir.
( ) Se a área A do rebite aumentar e a carga Q permanecer constante, a tensão admissível do material diminui.
( ) Se a área A do rebite diminuir e a carga Q permanecer constante, a tensão admissível do material diminui.
( ) A área do rebite varia proporcionalmente com a carga aplicada para que a tensão devido ao carregamento seja constante.
( ) Numa dada situação, ao ser trocado o rebite por outro rebite com material mais resistente e a carga permanecer constante, a área projetada do rebite pode diminuir.
Q2166828
Mecatrônica
Mancais são elementos de máquinas responsáveis por dar suporte ou guia onde eixos sejam
apoiados. A esse respeito, indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e
assinale a alternativa com a sequência correta de cima para baixo.
( ) Os mancais são classificados como deslizantes ou de rolamento.
( ) Mancais de rolamento são aplicados quando se deseja reduzir o atrito na partida em eixos em movimentos rotativos.
( ) Os mancais de deslizamento dispõem de roletes, sendo aplicados em máquinas pesadas.
( ) Os rolamentos são classificados, de acordo a direção das forças que suportam, em radiais ou de tração.
( ) Em situações em que desalinhamentos de eixos ou montagem possam ocorrer, é recomendada a utilização de rolamentos autocompensadores de esferas.
( ) Os mancais são classificados como deslizantes ou de rolamento.
( ) Mancais de rolamento são aplicados quando se deseja reduzir o atrito na partida em eixos em movimentos rotativos.
( ) Os mancais de deslizamento dispõem de roletes, sendo aplicados em máquinas pesadas.
( ) Os rolamentos são classificados, de acordo a direção das forças que suportam, em radiais ou de tração.
( ) Em situações em que desalinhamentos de eixos ou montagem possam ocorrer, é recomendada a utilização de rolamentos autocompensadores de esferas.
Q2166827
Mecatrônica
Com relação aos elementos de máquina, indique se as afirmativas a seguir são verdadeiras (V) ou
falsas (F) e assinale a alternativa com a sequência correta de cima para baixo.
( ) Rebites, cavilhas e pinos são elementos de máquina de fixação. ( ) O parafuso de rosca triangular tem aplicação na fixação de união de peças. ( ) Fusos de rosca quadrada têm aplicação na geração de movimento de ferramentas que sofrem esforços ou choques, como prensas e morsas. ( ) Atualmente as roscas triangulares são classificadas de acordo com seu perfil em três tipos: métrica, americana e Whitworth.
( ) Rebites, cavilhas e pinos são elementos de máquina de fixação. ( ) O parafuso de rosca triangular tem aplicação na fixação de união de peças. ( ) Fusos de rosca quadrada têm aplicação na geração de movimento de ferramentas que sofrem esforços ou choques, como prensas e morsas. ( ) Atualmente as roscas triangulares são classificadas de acordo com seu perfil em três tipos: métrica, americana e Whitworth.
Q2166826
Mecatrônica
Tomando por base a norma ISO 1219, o desenho abaixo apresenta um circuito pneumático
contendo uma válvula conectada a um cilindro pneumático. 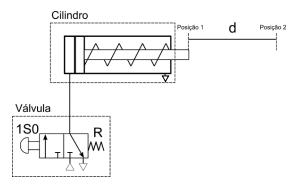
Com relação a esse circuito pneumático, indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e assinale a alternativa com a sequência correta de cima para baixo.
( ) A válvula é direcional do tipo 3/2. ( ) A válvula tem acionamento mecânico e retorno por mola. ( ) A válvula é normalmente fechada de controle por solenoide. ( ) O cilindro tem retorno por mola. ( ) Quando o acionamento 1S0 for ativado, o pistão do cilindro avança linearmente até a posição 2 e retorna automaticamente até a posição 1, repetindo esse ciclo até que 1S0 seja desativado.
Com relação a esse circuito pneumático, indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e assinale a alternativa com a sequência correta de cima para baixo.
( ) A válvula é direcional do tipo 3/2. ( ) A válvula tem acionamento mecânico e retorno por mola. ( ) A válvula é normalmente fechada de controle por solenoide. ( ) O cilindro tem retorno por mola. ( ) Quando o acionamento 1S0 for ativado, o pistão do cilindro avança linearmente até a posição 2 e retorna automaticamente até a posição 1, repetindo esse ciclo até que 1S0 seja desativado.
Q2166825
Mecatrônica
As redes de comunicação para automação industrial são classificadas em Sensorbus, Devicebus e
Fieldbus, de acordo com o tipo de controle, de dispositivos e de mensagens para os quais são
concebidas. Em relação a essa classificação, analise as afirmativas abaixo e assinale a alternativa
correta.
I. As redes ASi são um exemplo típico de Sensorbus voltadas à comunicação de sensores e atuadores discretos.
II. As Devicebus são especificadas para comunicação de controladores lógicos programáveis e outros dispositivos de automação industrial cujas mensagens são predominantemente organizadas em bytes.
III. As altas taxas de transmissão de dados das redes Fieldbus garantem que os sinais digitais sejam transmitidos em tempo real entre os sensores e atuadores distribuídos nas malhas de controle do processo industrial.
IV. As barreiras de segurança intrínseca das redes Fieldbus permitem que estratégias de controle e de segurança sejam executas localmente nos atuadores instalados em áreas classificadas, sujeitas a risco de incêndio e explosão.
I. As redes ASi são um exemplo típico de Sensorbus voltadas à comunicação de sensores e atuadores discretos.
II. As Devicebus são especificadas para comunicação de controladores lógicos programáveis e outros dispositivos de automação industrial cujas mensagens são predominantemente organizadas em bytes.
III. As altas taxas de transmissão de dados das redes Fieldbus garantem que os sinais digitais sejam transmitidos em tempo real entre os sensores e atuadores distribuídos nas malhas de controle do processo industrial.
IV. As barreiras de segurança intrínseca das redes Fieldbus permitem que estratégias de controle e de segurança sejam executas localmente nos atuadores instalados em áreas classificadas, sujeitas a risco de incêndio e explosão.
Q2166824
Mecânica
As figuras a seguir representam uma prensa hidráulica automática e o programa em Diagrama de
Contatos (Ladder Diagram) implementado em um controlador lógico programável (CLP) para a
automação dessa prensa.
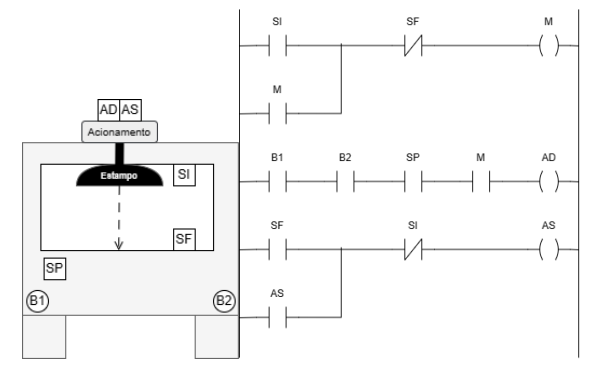
A prensa possui os seguintes sinais discretos de interface com o CLP, todos ativos em nível alto: dois botões (B1 e B2) para comando da prensa pelo operador; um sensor SP que indica que a grade de proteção está fechada; dois sensores de fim-de-curso SI e SF, indicando respectivamente as posições inicial e final do estampo; um comando AD para acionamento do movimento de descida do estampo; e um comando AS para acionar a subida do estampo. Já a variável M do Diagrama de Contatos está associada a um bit da memória de dados do CLP. Em relação a esse controle lógico programado, analise as afirmativas abaixo e assinale a alternativa correta.
I. Se o estampo estiver parado na posição inicial (SI = 1) e a grade de proteção estiver fechada (SP = 1), ele somente começa a descer quando o operador pressionar os dois botões (B1 = B2 = 1).
II. O estampo inicia o movimento de subida automaticamente após atingir a posição final (SF = 1).
III. Se o operador soltar o botão B1 (B1 = 0) com o estampo em movimento de descida, o estampo para de descer.
IV. Se a grade de segurança for aberta (SP = 0) com o estampo em movimento de subida, o estampo para de subir.
A prensa possui os seguintes sinais discretos de interface com o CLP, todos ativos em nível alto: dois botões (B1 e B2) para comando da prensa pelo operador; um sensor SP que indica que a grade de proteção está fechada; dois sensores de fim-de-curso SI e SF, indicando respectivamente as posições inicial e final do estampo; um comando AD para acionamento do movimento de descida do estampo; e um comando AS para acionar a subida do estampo. Já a variável M do Diagrama de Contatos está associada a um bit da memória de dados do CLP. Em relação a esse controle lógico programado, analise as afirmativas abaixo e assinale a alternativa correta.
I. Se o estampo estiver parado na posição inicial (SI = 1) e a grade de proteção estiver fechada (SP = 1), ele somente começa a descer quando o operador pressionar os dois botões (B1 = B2 = 1).
II. O estampo inicia o movimento de subida automaticamente após atingir a posição final (SF = 1).
III. Se o operador soltar o botão B1 (B1 = 0) com o estampo em movimento de descida, o estampo para de descer.
IV. Se a grade de segurança for aberta (SP = 0) com o estampo em movimento de subida, o estampo para de subir.
Q2166823
Programação
Considere a seguinte função f, programada recursivamente em linguagem C:
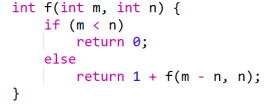
Qual função matemática de inteiros positivos m e n é implementada por f ?
Q2166822
Mecatrônica
Indique se as afirmativas a seguir, a respeito de controladores lógicos programáveis (CLPs)
usados em automação industrial, são verdadeiras (V) ou falsas (F) e assinale a alternativa com a
sequência correta de cima para baixo.
( ) A norma IEC 61131-3 especifica estas cinco linguagens para programação de CLP: Assembly, C, Diagrama de Contatos (Ladder Diagram), Diagrama de Blocos (Function Block Diagram) e Diagrama Sequencial (Sequencial Flow Chart).
( ) Em operação normal (modo RUN), o CLP realiza periodicamente o ciclo de varredura que basicamente grava as informações das portas de entradas nas respectivas memórias-imagem, processa a lógica programada e só então atualiza as portas de saída de acordo com o estado das respectivas memórias-imagem.
( ) Em razão da confiabilidade operacional, do alto desempenho de seus processadores, da alta capacidade de memória e do baixo custo, os CLPs industriais são os dispositivos mais indicados para o processamento de imagens em equipamentos de controle de qualidade da produção.
( ) Segundo a norma IEC 61131-3, a programação de CLPs em Diagrama de Contatos (Ladder Diagram) segue a mesma lógica de um circuito elétrico de relés, de modo que uma mudança na ordem em que os degraus (rungs) são programados no diagrama não pode alterar o comportamento gerado pelo CLP.
( ) A norma IEC 61131-3 especifica estas cinco linguagens para programação de CLP: Assembly, C, Diagrama de Contatos (Ladder Diagram), Diagrama de Blocos (Function Block Diagram) e Diagrama Sequencial (Sequencial Flow Chart).
( ) Em operação normal (modo RUN), o CLP realiza periodicamente o ciclo de varredura que basicamente grava as informações das portas de entradas nas respectivas memórias-imagem, processa a lógica programada e só então atualiza as portas de saída de acordo com o estado das respectivas memórias-imagem.
( ) Em razão da confiabilidade operacional, do alto desempenho de seus processadores, da alta capacidade de memória e do baixo custo, os CLPs industriais são os dispositivos mais indicados para o processamento de imagens em equipamentos de controle de qualidade da produção.
( ) Segundo a norma IEC 61131-3, a programação de CLPs em Diagrama de Contatos (Ladder Diagram) segue a mesma lógica de um circuito elétrico de relés, de modo que uma mudança na ordem em que os degraus (rungs) são programados no diagrama não pode alterar o comportamento gerado pelo CLP.
Q2166821
Mecatrônica
Considerando a organização de um sistema computacional básico, relacione os termos da coluna
1 às definições da coluna 2 e assinale a alternativa com a sequência correta de cima para baixo.
Coluna 1 I. ULA II. Unidade de controle III. Unidade de memória IV. Unidade de entrada V. Seção de registradores
Coluna 2 ( ) Conjunto de dispositivos usados para obter dados externos ao computador.
( ) Elemento de um microcomputador responsável por armazenar programas e dados que podem ou não ser alterados pelo microprocessador.
( ) Área de um microprocessador que realiza operações aritméticas e lógicas sobre os dados.
( ) Área de um microprocessador responsável por gerar os sinais apropriados para execução das instruções.
( ) Área de um microprocessador com grupos de flip-flops que realizam diversas funções de contagem e armazenamento temporário de dados, instruções e endereços de memória durante a execução de programas.
Coluna 1 I. ULA II. Unidade de controle III. Unidade de memória IV. Unidade de entrada V. Seção de registradores
Coluna 2 ( ) Conjunto de dispositivos usados para obter dados externos ao computador.
( ) Elemento de um microcomputador responsável por armazenar programas e dados que podem ou não ser alterados pelo microprocessador.
( ) Área de um microprocessador que realiza operações aritméticas e lógicas sobre os dados.
( ) Área de um microprocessador responsável por gerar os sinais apropriados para execução das instruções.
( ) Área de um microprocessador com grupos de flip-flops que realizam diversas funções de contagem e armazenamento temporário de dados, instruções e endereços de memória durante a execução de programas.
Q2166820
Mecatrônica
As saídas digitais de controladores lógicos programáveis (CLPs) são utilizadas para acionar
diversos tipos de atuadores discretos, como válvulas solenoides, motores e lâmpadas. Existem
basicamente três classes: saídas a relé, saídas a transistor e saídas a tiristor. Indique se as
afirmativas a seguir, a respeito de saídas digitais de CLPs, são verdadeiras (V) ou falsas (F) e
assinale a alternativa com a sequência correta de cima para baixo.
( ) As saídas a relé podem atuar em uma ampla faixa de tensão e corrente, o que reduz a necessidade de circuitos auxiliares.
( ) As saídas a transistor são especificadas para comutar tanto circuitos em corrente contínua quanto em corrente alternada.
( ) Por serem baseadas em elementos estáticos, as saídas a transistor possuem maior velocidade de comutação que as saídas a relé.
( ) Por serem baseadas em elementos eletromecânicos, as saídas a tiristor possuem menor vida útil que as saídas a relé.
( ) As saídas a relé podem atuar em uma ampla faixa de tensão e corrente, o que reduz a necessidade de circuitos auxiliares.
( ) As saídas a transistor são especificadas para comutar tanto circuitos em corrente contínua quanto em corrente alternada.
( ) Por serem baseadas em elementos estáticos, as saídas a transistor possuem maior velocidade de comutação que as saídas a relé.
( ) Por serem baseadas em elementos eletromecânicos, as saídas a tiristor possuem menor vida útil que as saídas a relé.