Questões de Concurso
Para professor - controle automação instrumentação industrial
Foram encontradas 100 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Um robô industrial é uma máquina programável de propósito geral que possui certas características antropomórficas, sendo o braço mecânico (ou manipulador) a característica antropomórfica mais óbvia. O manipulador, combinado com um controlador de alto nível, permite que um robô industrial realize várias tarefas como carregamento e descarregamento de máquinas e equipamentos, processo de soldagem e pintura pulverizada.
Em relação aos robôs industriais, pode-se afirmar
que:
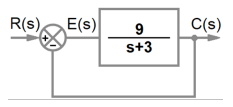
Um dos critérios no estudo da qualidade de sistemas de controle em malha fechada é
o Erro de regime permanente, determinado por
Ereg = 
Deste modo, determine-o para o sistema de primeira ordem representado no diagrama de blocos a seguir considerando uma entrada de degrau unitário.
Fonte: IFSP, 2024
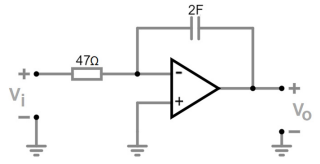
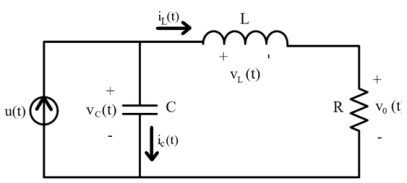
A modelagem matemática representa uma etapa importante em projetos de engenharia de controle
em que, após a aplicação das leis fundamentais, simplificações e aproximações, é possível determinar
uma equação matemática capaz de representar de
forma próxima o comportamento dinâmico de um
determinado sistema, seja ele térmico, mecânico,
elétrico ou hidráulico. Deste modo, dado o circuito
eletrônico a seguir, obtenha a função de transferência que represente seu comportamento dinâmico,
considerando o amplificador operacional ideal.
Fonte: IFSP, 2024
O Modbus é um dos protocolos de comunicações industriais mais antigos e ainda muito utilizado nos dias atuais na industria. Sobre o protocolo de comunicação Modbus e suas variantes
Modbus RTU, Modbus ASCII e Modbus TCP/IP,
é correto afirmar:
Um engenheiro de automação está programando um Controlador Lógico Programável
(CLP) para gerenciar o controle de um sistema de
esteiras em uma fábrica. O CLP é programado utilizando a linguagem Ladder para garantir que as
esteiras operem de maneira segura. A figura abaixo
mostra um diagrama Ladder utilizado para acionar
duas saídas, esteira 1 (Y1) e esteira 2 (Y2), com
base nas entradas X1, X2, X3 e X4.
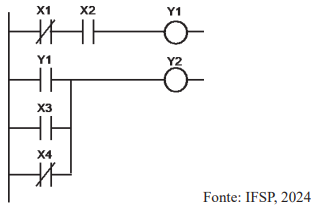
Com base no diagrama apresentado, analise as seguintes afirmativas:
I. Se a entrada X1 estiver desacionada, a esteira 1 será acionada, independentemente do estado de X2.
II. A esteira 2 será acionada se X3 e X4 forem acionadas.
III. Se todas as entradas estiverem desacionadas, a esteira 2 será acionada.
Quais afirmativas estão corretas?
O funcionamento de inversor de frequência consiste na variação da frequência que alimenta o motor
de indução trifásico, por meio de um circuito de controle e dispositivos de estado sólido, inicialmente tiristores e, nos dias atuais, IGBT’s. Porém, operar um motor com frequências abaixo ou acima da sua frequência nominal pode trazer dificuldades à operação. A figura a seguir mostra uma curva operacional típica que
os fabricantes divulgam para evitar danos ao motor, em que um fator é aplicado ao conjugado nominal para
determinar sua capacidade de trabalho.
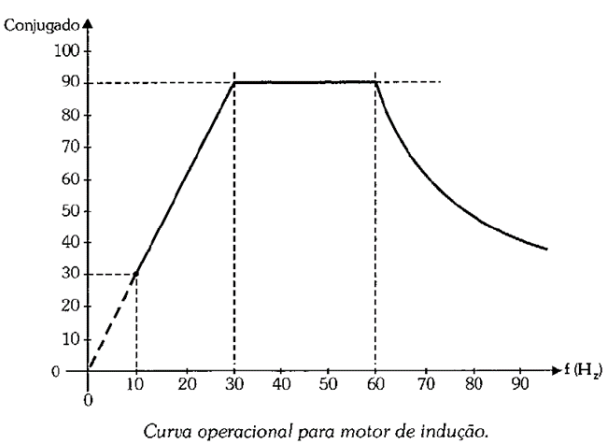
Fonte: FRANCHI, C. M. Acionamentos Elétricos.São Paulo: Érica, 4ª edição, 2014.
Assim, sobre operações com inversores de frequência, assinale a alternativa correta.
Em uma fábrica, um engenheiro precisa garantir que uma bomba de água seja ligada apenas
5 segundos após um sensor de nível detectar que
o tanque está vazio. Para isso, ele configurou um
temporizador de retardo na energização (TON)
com um tempo de 5 segundos no CLP. A bomba
deve permanecer ligada enquanto o sensor continuar indicando que o tanque está vazio. O que
acontecerá com a bomba se o sensor de nível detectar que o tanque está vazio por 3 segundos e, em
seguida, o nível voltar ao normal?
Em uma planta industrial, um motor trifásico de 9 kW é utilizado para acionar uma esteira transportadora que opera em um ambiente de produção contínua. O motor, que opera a 220 V e possui um fator de potência de 0,8, é acionado por partida direta, uma solução simples e eficaz para este tipo de aplicação. O engenheiro responsável pelo sistema precisa calcular a corrente de partida do motor, que é essencial para o dimensionamento adequado dos componentes de proteção e controle do motor. A corrente de partida do motor é aproximadamente cinco vezes a corrente nominal, de forma que possa garantir a segurança operacional da planta. Com base nessas informações, qual será a corrente de partida do motor, de forma aproximada? Considere um rendimento de 100% e use a aproximação √3=1,7.
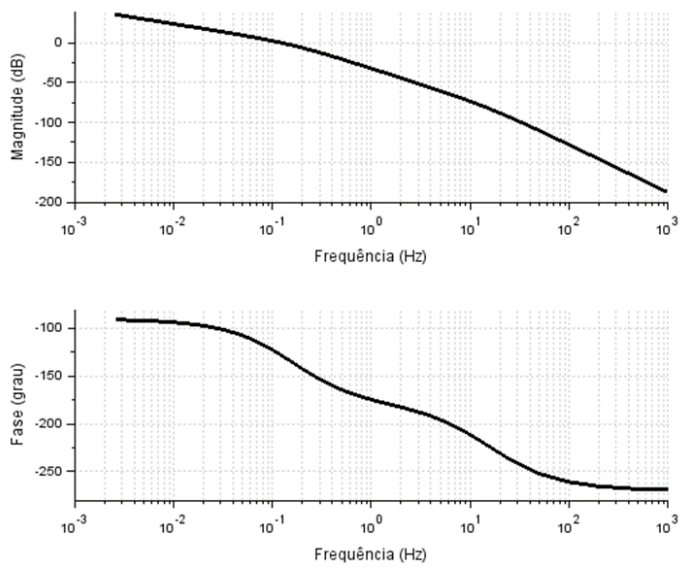
No estudo de sistemas de controle, nem sempre temos acesso fácil à função de transferência para
estudar a sua estabilidade. Uma técnica que pode ser utilizada neste caso é o levantamento experimental do
seu diagrama de bode.
Fonte: IFSP, 2024
Considerando o diagrama de bode apresentado, determine a margem de ganho, margem de fase e a estabilidade deste sistema linear.
Considere um robô planar com duas juntas rotativas (RR), em que o comprimento do primeiro link é L1 e o comprimento do segundo link é L2. A cinemática direta relaciona os ângulos das juntas (θ1 e θ2) com a posição do efetuador final no plano XY. Qual é a equação da cinemática direta que descreve a posição (x, y) do efetuador final em termos dos ângulos das juntas e dos comprimentos dos links?
A pneumática e a automação estão intimamente relacionadas. Em tempos atuais, a pneumática integrada a controles eletrônicos é uma das tecnologias mais utilizadas na automação industrial, permitindo a otimização de processos e sistemas industriais.
Em relação à pneumática, pode-se afirmar que:
Uma empresa necessita realizar a supervisão e controle de uma etapa de seu processo, para isso foi indicada a instalação de um Sistema de Supervisão e Aquisição de Dados (SCADA). Sobre os sistemas SCADA, é correto afirmar que:
I. SCADA é utilizado principalmente para monitorar e controlar processos industriais em tempo real, coletando dados de sensores e atuadores e permitindo a intervenção manual e a automática.
II. Os sistemas SCADA são exclusivamente projetados para ambientes de manufatura e não são adequados para aplicações em sistemas como distribuição de água e energia elétrica.
III. SCADA permite a integração de diferentes tipos de equipamentos e sistemas, fornecendo uma interface gráfica que ajuda os operadores a visualizar e analisar dados em tempo real.
IV. Embora SCADA seja essencial para monitoramento em tempo real, não possui capacidade de armazenar dados históricos, o que limita a análise de tendências e o diagnóstico de problemas.
Durante o desenvolvimento de um sistema
de controle de velocidade para motores, um engenheiro está utilizando um microcontrolador de 8
bits para gerar um sinal PWM (Pulse Width Modulation). Para verificar a precisão do sinal gerado,
ele utiliza um osciloscópio para analisar o sinal
PWM. A largura do pulso do sinal PWM é definida por um código de 8 bits e exibida conforme o
gráfico abaixo:
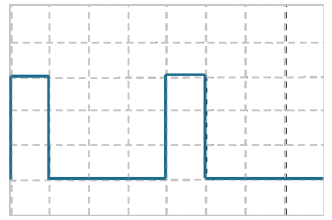
Fonte: IFSP, 2024
Sabendo que a base de tempo do osciloscópio está calibrada em 1 ms/DIV, a frequência do sinal PWM e o valor do código, em decimal, correspondente à largura do pulso valem, respectivamente:
Em relação aos instrumentos de medição por comparação, pode-se afirmar que:
Considere o seguinte circuito elétrico:
Fonte: IFSP, 2024
O diagrama de blocos a seguir representa uma planta de um motor de corrente contínua. Deseja-se
incluir um controlador que, ao adicionar um ganho, garante a estabilidade do sistema em malha fechada.
Determine a faixa de valores de ganho K, para que o sistema realimentado seja estável.
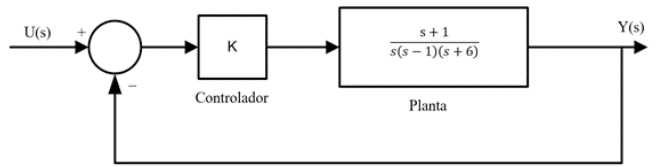
Fonte: IFSP, 2024
A linguagem C é vastamente utilizada na programação de microcontroladores e sistemas embarcados.
Ela permite acesso direto ao hardware, o que é bastante desejável para muitos dispositivos eletrônicos. Considere o código abaixo, escrito no Dev C++ 5.11. Ao final da execução do algoritmo no compilador, quais
valores serão exibidos no console?
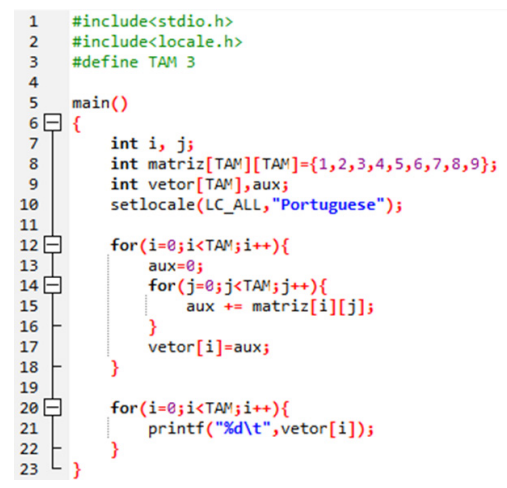
Fonte: IFSP, 2024
Redes Neurais Artificiais são técnicas computacionais que utilizam um modelo matemático inspirado no neurônio biológico, obtendo aprendizado pela experiência. Encontra aplicações em visão computacional, automação residencial e industrial, robótica, microeletrônica, entre outros. A respeito de redes neurais MLP (Multi-layer Perceptron), analise as afirmativas:
I. Os parâmetros a serem definidos para a execução de uma rede MLP são número de camadas, número de neurônios em cada camada, taxa de aprendizado e função de ativação;
II. São redes recorrentes;
III. Os neurônios da camada oculta são capazes de capturar a não-linearidade dos dados;
IV. Geralmente utiliza-se a função sigmóide como função de ativação nas camadas oculta e de saída.
As afirmativas corretas são:
A instrumentação é muito importante em sistemas industriais, pois assegura a qualidade dos produtos e a confiabilidade dos dados e processos industriais. Na indústria são comumente empregados os instrumentos de medição para dimensões lineares, tais como paquímetros, compassos e outros.
Em relação aos instrumentos de medição para dimensões lineares, pode-se afirmar que: