Questões de Concurso
Para engenheiro de controle e automação
Foram encontradas 228 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
A resposta ao impulso de um filtro discreto é:

Um degrau unitário discreto u[n] é aplicado neste filtro. Os valores da saída y[n] serão:
Abaixo a resposta ao degrau unitário de quatro sistemas diferentes.
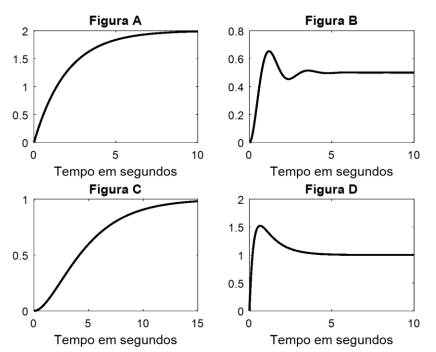
Analise as afirmativas a seguir:
1. O sistema da figura D possui zero e não é oscilatório.
2. As figuras B e D mostram sistemas oscilatórios e D apresenta o maior sobre-sinal.
3. O sistema da figura A é de 1ª ordem e a constante de tempo é aproximadamente 1,26 segundos.
4. O sistema da figura C têm pelo menos dois polos reais.
5. Os sistemas das figuras B e D têm polos complexos conjugados.
São CORRETAS as afirmativas:
A figura a seguir mostra a saída m(t) de um algoritmo PID para a entrada e(t).
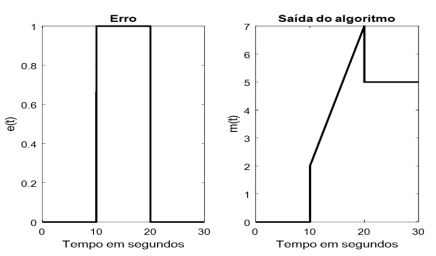
Sabendo que a equação do algoritmo é:

Analise as afirmativas a seguir:
1. O algoritmo empregado é o PID ISA ou PID ideal.
2. O algoritmo empregado é o PID paralelo ou clássico.
3. Analisando a figura, conclui-se que: KP = 1, TI = 2 e TD = 1.
4. Analisando a figura, conclui-se que: KP = 2, TI = 4 e TD = 0.
São CORRETAS as afirmativas:
Considere o L.R a seguir de um sistema de controle com realimentação unitária, onde os valores do ganho K mostrados ocorrem nos pontos indicados pelas setas.
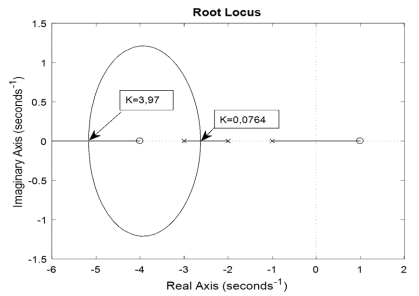
Analise as afirmativas:
1. O sistema é instável em malha aberta.
2. Existem duas faixas para o ganho K em que o sistema em malha fechada é estável, mas oscilatório.
3. A resposta ao degrau em malha fechada será instável sem oscilação para K>3,97.
4. O sistema em malha fechada será estável e oscilatório para 0,0764<K< 1,5.
5. O sistema em malha fechada é estável para 0 < K < 1.5.
São CORRETAS as afirmativas:
Leia as frases abaixo sobre VÁLVULAS DE CONTROLE.
1. No cálculo de uma válvula, é sempre necessário verificar se vai ocorrer a cavitação.
2. As válvulas BORBOLETA tendem a cavitar mais facilmente que as do tipo GLOBO.
3. Para bom dimensionamento, a queda de pressão através da válvula não deve ser escolhida maior que 10% da queda de pressão total na linha.
4. A válvula GLOBO DUPLA SEDE é indicada para grandes vazões e pequenos diferenciais de pressão.
5. A queda de pressão através da válvula que dá início à cavitação, chamada de pressão diferencial crítica, depende do fator Cf.
São FALSAS as afirmativas:
Leia as frases abaixo sobre o MEDIDOR DE VAZÃO ELETROMAGNÉTICO.
1. Não mede gás ou vapor, mas pode medir qualquer tipo de líquido.
2. A densidade do líquido medido deve ser mantida constante para uma medição precisa.
3. O tubo do medidor eletromagnético pode ser metálico, mas de material não magnético.
4. O chamado “efeito de transformador” pode ser eliminado amostrando-se o sinal durante os períodos de fluxo magnético constante.
5. Pode medir fluxo nos dois sentidos da tubulação.
São VERDADEIRAS as afirmativas:
Analise as afirmativas a seguir sobre o “STRAIN GAGE”:
1. Num “strain gage”, se os quatro braços sensores sofrem uma tensão igual, então a saída da ponte será nula.
2. Células “strain gage” são amplamente empregadas na medição de peso, torque e força.
3. Num “strain gage” variam o comprimento e a área, mas a resistividade permanece sempre constante.
4. A sensibilidade do “strain gage” dá uma medida da variação relativa de sua resistência em função de uma variação no seu comprimento.
5. A histerese mecânica e a dilatação linear são fontes de erro na medição com “strain gages”.
São CORRETAS as afirmativas:
Analise as afirmativas a seguir sobre o cálculo de PLACA DE ORIFÍCIO:
1. Para o cálculo direto de uma placa de orifício, a pressão diferencial é escolhida pelo projetista.
2. O parâmetro β de uma placa de orifício define a relação entre as vazões máxima e normal do fluido.
3. Para cada tipo de tomada (vena, radius, flange etc), existe um conjunto de equações empíricas específicas.
4. O trecho reto mínimo necessário, antes e depois da placa, depende do valor de β e do número de Reynolds.
5. No cálculo inverso, o valor de β é determinado escolhendo-se a pressão diferencial a ser gerada pela placa com vazão máxima.
São CORRETAS apenas as afirmativas:
Analise as seguintes afirmativas sobre a PLACA DE ORIFÍCIO:
1. Para medir corretamente a placa de orifício, necessita-se que o regime de fluxo seja laminar.
2. A placa de orifício é apropriada para medição de fluxos pulsantes.
3. Mede líquidos e vapor, mas não pode ser empregada para medir gases.
4. Introduz uma perda de carga permanente na linha.
5. Para uma medição precisa, a vazão não pode ser menor que 10% da vazão máxima.
São CORRETAS as afirmativas:
Analise as seguintes afirmativas sobre as TERMORESISTÊNCIAS:
1. Para metais puros, a relação entre a resistência e a temperatura pode ser expressa aproximadamente por: Rt = Ro(1+at), sendo Ro o valor da resistência a 100ºC e “a” uma constante que depende do material.
2. Na medição a 4 fios, a resistência de contato nos terminais do sensor e instrumento de painel não produzem erros, porque este método se baseia em uma fonte de corrente constante.
3. Na medição a três fios, a precisão da medida vai depender do comprimento da ligação campo painel.
4. Na medição a dois fios, o negativo da fonte é levado até o ponto de medição no campo.
5. O transmissor de temperatura permite que se utilizem 2 fios na ligação campo painel, mesmo que se empregue o método de medição a três fios.
São CORRETAS as afirmativas:
Analise a situação descrita a seguir, envolvendo medição de temperatura com TERMOPARES.
Para uma determinada temperatura T são conhecidas:
EAC: Força eletromotriz gerada pelo par A(+) e C(−).
ECB: Força eletromotriz gerada pelo par C(+) e B(−).
Neste caso:
1. A força eletromotriz gerada pelo par A e B será EAB = EAC + ECB
2. A força eletromotriz gerada pela ligação em série de EAC e ECB será (EAC + ECB)/2.
3. A força eletromotriz gerada pela ligação em paralelo de EAC e ECB será (EAC + ECB)/2.
4. A força eletromotriz gerada pela ligação diferencial de EAC e ECB será EAC − ECB
5. Só é possível determinar força eletromotriz gerada pelo par A e B medindo-se diretamente a FEM do par EAB.
São CORRETAS as afirmativas:
Analise as seguintes afirmativas sobre os TERMOPARES:
1. Para cada par termoelétrico existe um cabo de compensação/extensão correspondente.
2. Dois termopares podem ser interligados em paralelo para aumentar a confiabilidade da medição.
3. A inversão dos fios nos terminais do instrumento é o pior tipo de inversão porque, neste caso, o erro não será facilmente percebido.
4. A inserção de um terceiro condutor de material diferente em um par termoelétrico pode ou não alterar a f.e.m. gerada pelo par.
5. Dentro de sua faixa de utilização, a precisão do termopar não depende da temperatura.
São FALSAS as afirmativas:
Filtros analógicos Sallen-Key possuem a vantagem prática de serem constituídos por componentes de igual valor.
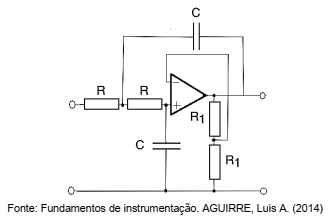
A figura em questão representa um filtro:
Considerando a norma IEC 61131-3 e a linguagem de programação IL (Instruction List), a CORRETA interpretação do código:
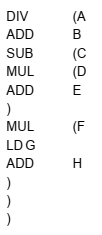
é a operação:
O SDCD (Sistema Digital de Controle Distribuído), ou apenas SCD, é uma das tecnologias utilizadas em automação de sistemas industriais. Outras tecnologias muito empregadas são o CLP (Controlador Lógico Programável) e os sistemas SCADA (Supervisory Control and Data Acquisition), também denominados Sistemas Supervisórios.
Com relação a essas três tecnologias, pode-se afirmar:
I. SDCD são sistemas que integram as funcionalidades de controle e supervisão em uma única solução.
II. CLPs são plataformas microprocessadas capazes de manipulação de sinais analógicos e controle discreto, destituídos de interfaces homem-máquina elaboradas para sua operação.
III. Sistemas Supervisórios são softwares que rodam em computadores e oferecem recursos de supervisão e controle de processos industriais, desde que se comuniquem com CLPs ou similares para aquisição de dados.
São verdadeiras as afirmativas:
O LADDER apresentado controla um motor, de forma que o mesmo possa girar nos dois sentidos (horário e anti-horário) através do acionamento de cada uma das saídas ilustradas. Existe um intertravamento para garantir que o acionamento de uma das saídas impeça o acionamento da outra e vice-versa.
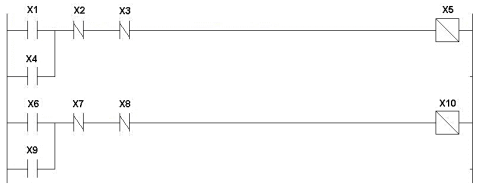
Os seguintes comandos foram implementados:
B1 – Botoeira para girar em sentido horário
B2 – Botoeira para girar em sentido anti-horário
B3 – Botoeira Desliga Motor
Q1 – Liga Motor em sentido Horário
Q2 – Liga Motor em sentido anti-horário
A CORRETA sequência dos comandos no LADDER é:
Os dispositivos de comando elétrico de um motor devem levar em conta a segurança do operador.
Sendo assim, a CORRETA sequência dos elementos no circuito de potência necessários à partida e manobra de um motor, a partir da alimentação de energia elétrica será:
Fieldbus é uma designação genérica que corresponde às mais diversas tecnologias empregadas em redes de campo para comunicação de dados.
Com relação às redes fieldbus, pode-se afirmar:
I. São barramentos seriais multiponto utilizados para a comunicação de dados entre controladores, sensores, atuadores e demais dispositivos de campo.
II. Utilizam a sinalização de instrumentação 4-20 mA para transportarem os dados digitais.
III. ISão redes orientadas ao tempo real e de natureza estocástica.
É verdadeiro apenas o que se afirma em:
Amplificadores operacionais são dispositivos comumente empregados em malhas de controle analógico. Para tanto, podem implementar uma gama de funções matemáticas através da combinação de elementos passivos como resistores e capacitores.
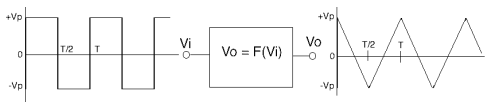
Assim sendo, o circuito típico utilizando amplificadores operacionais que MELHOR representa a relação entre a entrada e a saída de sinal para o bloco é: