Questões de Concurso
Para automação
Foram encontradas 371 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
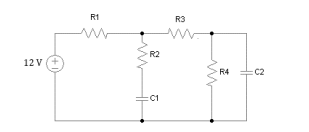
Dado que o circuito já se encontra em regime permanente, com C1 e C2 completamente carregados, a soma da energia armazenada nos capacitores é igual a
I. Os sensores indutivos e os sensores capacitivos discretos têm em comum a presença de um circuito oscilador.
II. No sensor ótico de barreira, o emissor e o receptor são montados no mesmo invólucro.
III. Devido à natureza do sinal emitido, um sensor ultrassônico não detecta superfícies metálicas.
Qual(is) está(ão) corretas?
Qual o paradigma predominante no que diz respeito à prática de ensino utilizando a robótica?
Nessas condições, verifica-se que existe uma
Uma técnica que NÃO se aplica a essa aproximação é a(o)
Considere A uma matriz quadrada ortogonal qualquer não nula.
Com relação a essa matriz, observa-se que
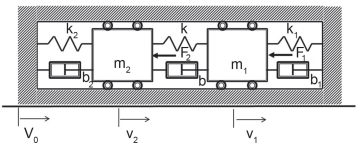
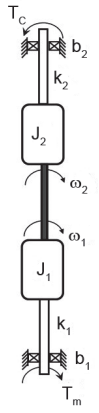
A matriz de amortecimento desse sistema é dada por
Considere a função de transferência padrão de um sistema dinâmico de 2a ordem, com um zero na origem
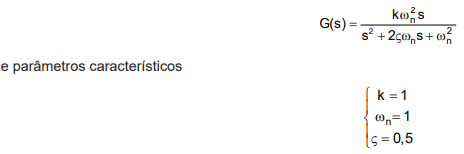
Supondo-se condições iniciais nulas, a resposta no tempo desse sistema a uma rampa unitária aplicada no instante de
tempo t = 2 segundos é
yi+1 = yi + h f(xi , yi )
Essa fórmula de recorrência descreve um método numérico para solução computacional de equações diferenciais.
Tal método é o de
O Teorema da Derivada da Transformada de Laplace estabelece que
Assim sendo,  é igual a
é igual a
Considere que dois elementos dinâmicos são acoplados com transferência de potência entre eles.
O efeito descrito acima é o de
Suponha um elemento dinâmico cuja relação entre as variáveis de potência seja dada por

na qual k é uma constante dependente das propriedades físicas e geométricas do elemento.
Esse elemento dinâmico é um

Considere que há conservação de potência na transferência da potência do domínio 1, associado às variáveis (e1 , f1 ), para o domínio 2, relacionado às variáveis (e2 , f2 ), quando tais domínios são acoplados pelo girador.
Qual é a relação entre ke e kf ?
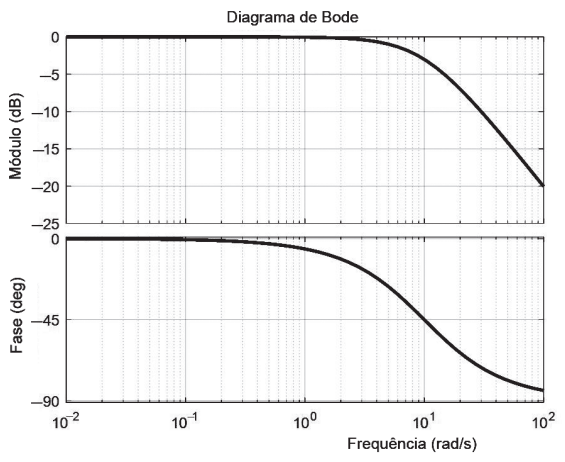
Considere que esse componente foi excitado por uma função periódica composta por senos e/ou cossenos, com frequências 0,01, 0,05, 0,08, 0,2 e 0,4 rad/s.
A saída desse componente será
Considere o diagrama de blocos abaixo.
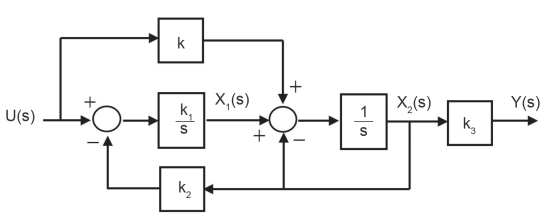
O modelo de estado associado ao diagrama de blocos é o seguinte:
Considere a FT de um controlador PID contínuo
e T o período de amostragem empregado no ZOH/SOZ do conversor A/D conectado ao controlador.
Nesse contexto, a FT do PID discreto equivalente ao
contínuo é: