Questões de Concurso
Para cartografia
Foram encontradas 1.157 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Existe um satélite que detém sensor com maior sensibilidade para captar pequenas diferenças de radiação, possibilitando maior poder de contraste e de discriminação dos alvos nas imagens, ou seja, possui a melhor resolução radiométrica.
Esse satélite é o
Em um modelo esférico, os meridianos são círculos máximos cujos planos contêm o eixo de rotação ou eixo dos polos, e os paralelos são círculos com plano perpendicular ao eixo dos polos.
A descrição desse modelo é referente ao sistema de coordenadas
• as únicas retas da projeção são o Meridiano Central e o Equador;
• pequena deformação próxima ao centro do sistema, mas aumenta rapidamente para a periferia;
• apropriada para uso em países ou regiões de extensão predominantemente Norte-Sul e reduzida extensão Este-Oeste.
A projeção cartográfica caracterizada é
O filtro de Kalman é um método recursivo que tem sido utilizado em certas aplicações, tais como o posicionamento cinemático por GPS e a navegação por sistema inercial. A modelagem funcional básica desse método é composta por duas equações matriciais, a das observações e a do modelo dinâmico:
Lb = A . X + V
X2 = T1/2 . X1 + W
Onde:
Lb é o vetor das observações;
A é a matriz dos coeficientes;
X é o vetor das variáveis aleatórias;
X1 é o vetor das variáveis aleatórias em um tempo t1 ;
X2 é o vetor das variáveis aleatórias em um tempo t2 ;
T1/2 é a matriz de transição do tempo t1 para o tempo t2 ;
V é o vetor de ruídos na equação das observações e
W é o vetor de ruídos na equação do modelo dinâmico.
Considerando que E(x), denota a esperança matemática de uma variável x, e Cov(x), a covariância de uma variável x, a afirmação:
Para que se possa aplicar o filtro de Kalman, uma das injunções iniciais é que haja independência estatística entre os ruídos da equação das observações e o modelo dinâmico.
significa que
A qualidade do resultado do posicionamento com receptores de uma frequência é afetada, principalmente, pela influência da ionosfera nos sinais GPS, que passou a ser a principal fonte de erro na navegação e no posicionamento com GPS, após a desativação da Disponibilidade Seletiva (SA).
Como o erro sistemático devido ao efeito da ionosfera é inversamente proporcional ao quadrado da frequência, uma forma de minimizá-lo é
Observe o relatório da estação 8112905, localizada no Rio de Janeiro, obtido no sítio do IBGE:
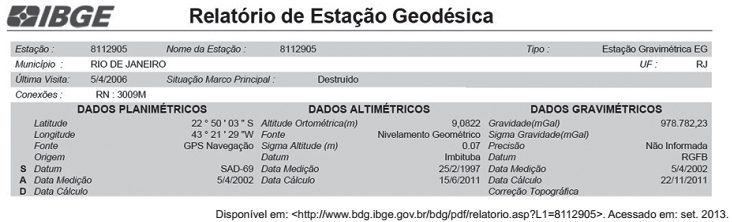
Considere que a redução de ar livre é dada pela expressão F = +0,3086H, e que o platô de Bouguer é AB = 0,1119H, e, para fins de cálculo, considere, também, que a altitude ortométrica é igual a 9,0 m.
Nessas condições, pelo processo de redução de Bouguer simplificada, a gravidade de Bouguer na Estação Gravimétrica
destruída vale, aproximadamente, em mGal,
Estudo com base nos registros de compras de passagens aéreas permitiu identificar as variações na demanda por voos internacionais entre os anos de 2010 e 2011, representadas no mapa da Figura abaixo.
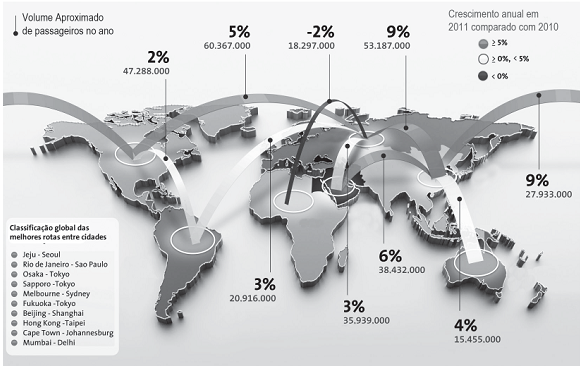
Disponível em: http://amadeus1a.com.br/tag/airconomy/. Acessado em: 2013. Adaptado.
Os elementos contidos na Figura permitem classificá-la como um mapa
A 2ª Edição da Norma Técnica para Georreferenciamento de Imóveis Rurais, do INCRA, aprovada em setembro de 2010, especifica a precisão para as diferentes classes de vértices empregados no levantamento dos limites dos imóveis. Tal especificação é feita na Tabela 1 da referida Norma, reproduzida abaixo. Também são especificados, nessa norma, os procedimentos quanto ao uso de métodos convencionais de levantamento (poligonação, irradiamento e triangulação) e quanto aos rastreios GPS. A Tabela 3 da Norma, (também reproduzida abaixo) apresenta a classificação das estações totais quanto à precisão.
Tabela 1 - Classificação de vértices quanto à finalidade, precisão e tipo
Classe Finalidade Precisão (M) Tipo
C1 Apoio básico / Apoio imediato / Limite ≤ 0,10 M
C2 Apoio imediato / Limite ≤ 0,20 M
C3 Desenvolvimento de poligonal / Limite ≤ 0,40 M, P
C4 Limite ≤ 0,50 M, P, V, O
C5 Limites naturais ≤ 2,00 P, V, O
C7 Limite - USO RESTRITO -
Tabela 3 - Classificação de estações totais
Classes de Estações Totais Desvio-padrão Precisão angular Desvio-padrão Precisão linear
1 - precisão baixa ≤ ± 30" ± (5 mm + 10 ppm * D)
2 - precisão média ≤ ± 07” ± (5 mm + 5 ppm * D)
3 - precisão alta ≤ ± 02” ± (3 mm + 3 ppm * D
Onde:
D = Distância medida em km.
Nota: ppm = parte por milhão.
Fonte: ABNT NBR 13.333, 1994, p.7.
Considerando as precisões especificadas na Tabela 1, as precisões proporcionadas pelos equipamentos e métodos
mencionados, o emprego de métodos convencionais de levantamento é recomendado para determinação de vértices de
classe igual ou inferior a