Questões Militares
Sobre automação industrial para engenharia de automação em engenharia de automação
Foram encontradas 20 questões
De acordo com o Teorema da Amostragem, ou Teorema de Nyquist, em um sinal contínuo no tempo, se a frequência de amostragem é suficientemente alta quando comparada ao componente da frequência mais alta envolvida nesse sinal, as características de amplitude do sinal contínuo no tempo podem ser preservadas em envelope do sinal amostrado.
Sendo assim, pode-se afirmar que quando essa condição não é respeitada, observa-se a ocorrência do fenômeno denominado:
Analise a figura abaixo.
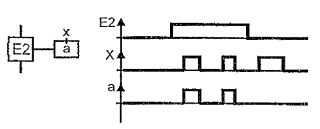
Qual é o tipo de ordem do GRAFCET representado na figura
acima ?
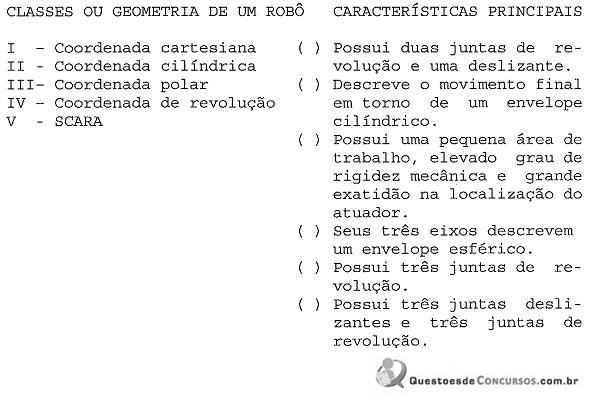
Analise o robô com pêndulo duplo da figura abaixo.

Analise as afirmativas abaixo referentes à seleção de robôs.
I - A decisão sobre o emprego ou não de robôs industriais se insere na análise global de investimentos de uma empresa .
II - A implantação de um sistema de produção robótico será mais bem realizada num processo com múltiplos passos, que envolve não apenas o robô, mas também o produto, os equipamentos de produção, o arranjo físico, entre outros fatores.
III- O processo de seleção envolve, em geral, várias interações entre micro e macro aspectos para uma solução satisfatória .
Assinale a opção correta.
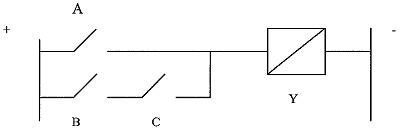
Na linguagem LADDER, cada contato, ao assumir dois estados, representa uma variável booleana.
Assinale a opção que apresenta a expressão booleana que representa o circuito acima.
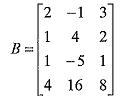
Assinale a opção que apresenta, respectivamente, o valor correspondente ao posto e à nulidade desta matriz.
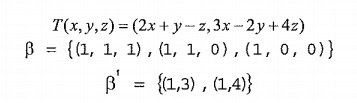
Assinale a opção que apresenta a matriz
 associada à transformação linear T em relação às bases ß e ß'.
associada à transformação linear T em relação às bases ß e ß'.
Em relação às matrizes acima, é correto afirmar que os

Assinale a opção que apresenta uma aproximação linear do torque T, em função do ângulo θ, em torno do ponto de equilíbrio (θ= 0) , razoavelmente precisa para -π/4≤θ≤π/ 4.
( ) A flexibilidade é um dos objetivos de um projeto de robotização.
( ) Dentre as três estratégias básicas de fabricação - manual, sistemas flexíveis e automação rígida -, somente o custo unitário de cada estratégia deve ser considerado na escolha da mais adequada.
( ) A especificação do método de programação é uma consideração técnica que deve ser analisada por ocasião da escolha do robô.
( ) Na análise de viabilidade econômica de um projeto de robotização, deve-se considerar que um robô não proporciona flexibilidade para atender às mudanças de mercado.
( ) O melhor arranjo físico para um robô industrial considera apenas as distâncias dos movimentos relacionados ao cumprimento da tarefa.