O controlador PID é largamente utilizado em automação e cont...
Próximas questões
Com base no mesmo assunto
Ano: 2015
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2015 - Quadro Complementar - Segundo Tenente - Máquinas - Ciências Náuticas |
Q572768
Engenharia Eletrônica
O controlador PID é largamente utilizado em automação e controle, e pode ser descrito por sua função de transferência no domínio da frequência como:
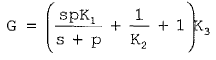
Onde cada um dos ganhos K1, K2 e K3, representam, respectivamente, os ganhos das ações que são ajustados independentemente. O primeiro método de Ziegler e Nichols, desenvolvido em 1942, denominado de Sensibilidade Limite, foi uma forma de sintonizar o controlador PID à planta que se deseja controlar. Segundo esse método, ajustam-se os ganhos até que se tenha uma oscilação contínua em malha fechada. Que ajuste é esse?
Onde cada um dos ganhos K1, K2 e K3, representam, respectivamente, os ganhos das ações que são ajustados independentemente. O primeiro método de Ziegler e Nichols, desenvolvido em 1942, denominado de Sensibilidade Limite, foi uma forma de sintonizar o controlador PID à planta que se deseja controlar. Segundo esse método, ajustam-se os ganhos até que se tenha uma oscilação contínua em malha fechada. Que ajuste é esse?