Questões de Concurso
Sobre função de transferência para engenharia de automação em engenharia de automação
Foram encontradas 17 questões
O Teorema da Derivada da Transformada de Laplace estabelece que
Assim sendo,  é igual a
é igual a
Considere o Lugar Geométrico das Raizes (LGR) da Figura abaixo.

Considerando-se as informações acima, verifica-se que
K = 3 é o ganho
Considere o diagrama de blocos da figura a seguir.
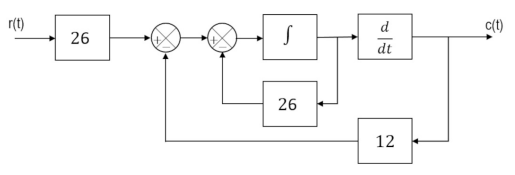
A função de transferência C(s) / R(s) do sistema representado por esse diagrama é dada por:
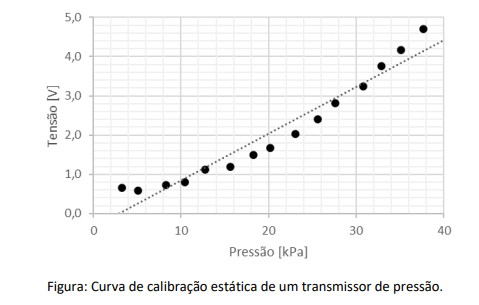
Com base na curva de calibração apresentada, é possível afirmar que:
Observe a figura a seguir:
Para o sistema representado na figura, a função de transferência de malha fechada C(s)/R(s) é
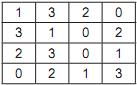
A partir dos dados assinalados, mantendo-se a mesma disposição, construiu-se uma matriz M.
O valor do determinante associado à matriz M é
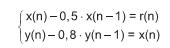
Para esse sistema, foi obtido um modelo equivalente discreto, com zero order hold, usando um período de amostragem de 10 ms. Considere que, para uma entrada degrau unitário, o tempo de acomodação (settling time) da resposta é calculado por
 , onde ς é a razão de amortecimento, e ωn é a frequência natural não amortecida do sistema contínuo.
, onde ς é a razão de amortecimento, e ωn é a frequência natural não amortecida do sistema contínuo. Supondo que o sistema discretizado tenha o mesmo desempenho que o sistema contínuo, aproximadamente, quantas amostras levará o sistema discreto para atingir o estado estacionário, partindo do instante inicial?
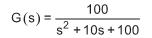
A função de Transferência do sistema

s3 + 9s2 + 23s + 15 + K
Variando K positivamente a partir de K = 0, o valor de K a partir do qual o sistema vai para a instabilidade é

O diagrama em blocos da figura acima mostra uma confi-
guração em malha fechada. Sabe-se que

 e K é uma constante positiva.
e K é uma constante positiva. 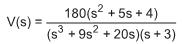
No domínio do tempo, quando t tende para infinito, o sinal v(t) tende para um valor estacionário, constante e igual a
A função de transferência no domínio de Laplace de um sistema linear é dada por onde Y(s) é a variável de saída e R(s), a variável de entrada. Nos três itens a seguir, considere as condições iniciais NULAS.
onde Y(s) é a variável de saída e R(s), a variável de entrada. Nos três itens a seguir, considere as condições iniciais NULAS.
O valor inicial, em t = 0, do sinal de saída desse sistema, quando se aplica um impulso unitário na entrada, é
A função de transferência no domínio de Laplace de um sistema linear é dada por onde Y(s) é a variável de saída e R(s), a variável de entrada. Nos três itens a seguir, considere as condições iniciais NULAS.
Para uma entrada degrau unitário, a saída desse sistema atinge a condição de regime permanente num tempo aproximadamente igual a
A função de transferência no domínio de Laplace de um
sistema linear é dada por onde Y(s) é a variável de saída e R(s), a variável de entrada. Nos três itens a seguir, considere as condições iniciais NULAS.
O valor da resposta em regime permanente desse sistema,
para uma entrada tipo degrau unitário, é
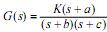 , em que K, a, b e c são números reais, será estável se
, em que K, a, b e c são números reais, será estável se
onde u(t) e y(t) representam, respectivamente, os sinais de entrada e de saída do sistema. A função de transferência G(s) =
 deste sistema é
deste sistema é