Questões de Concurso Sobre engenharia de automação
Foram encontradas 340 questões
Em um projeto de um sistema digital, busca-se realizar uma contagem cíclica com a sequência 0 - 1 - 4 - 5 - 0. Para implementar essa contagem, é proposto um circuito sequencial utilizando três flip-flops do tipo “D”, denominados A, B e C. Considera-se que as saídas dos três flip-flops Qc, Qb e Qa são utilizadas, nessa ordem, para gerar a sequência numérica de contagem. Observações: o estado futuro da saída do flip-flop é representado como Q'x, com x = b ou x = c. Ainda, a ordem de análise do número de contagem na saída considera Qc como o bit mais significativo e Qa como o bit menos significativo.
Exemplo: QcQbQa =1002 equivale ao número 4 na base decimal.
Quais equações lógicas representam o circuito mínimo que pode ser implementado para atender o projeto do contador proposto?
A tabela verdade é uma ferramenta de representação tabular utilizada em circuitos lógicos digitais para descrever o comportamento de funções lógicas ou portas lógicas. Ela exibe todas as combinações possíveis de entradas e os correspondentes estados de saída para um determinado circuito lógico ou expressão booleana. Considere a tabela verdade apresentada ao lado.
A expressão booleana simplificada correta que representa a saída S é?
Considere o circuito lógico abaixo.

Qual expressão booleana simplificada representa a saída S?
Os Controladores Lógicos Programáveis (CLPs) possuem instruções que permitem executar comandos apenas uma vez por ciclo de varredura (SCAN). Como exemplo, os CLPs da Rockwell® possuem a instrução ONS. Esse tipo de instrução pode ser implementado em lógica ladder, utilizando apenas contatos do tipo NA, NF e BOBINAS. Um circuito típico de automação que utiliza o conceito da instrução ONS é o de LIGA-DESLIGA, utilizando apenas uma botoeira conectada a uma entrada do CLP e que permite com um pulso LIGAR uma saída do CLP e com outro pulso DESLIGAR a mesma saída.
Identifique, dentre os circuitos apresentados a seguir, qual permite LIGAR-DESLIGAR a saída “rele” quando a entrada “botoeira” for acionada?
Qual dos sensores é mais adequado para medir a posição angular de uma junta rotativa em um sistema de controle de posicionamento de um robô industrial?
Um robô industrial é uma máquina programável de propósito geral que possui certas características antropomórficas, sendo o braço mecânico (ou manipulador) a característica antropomórfica mais óbvia. O manipulador, combinado com um controlador de alto nível, permite que um robô industrial realize várias tarefas como carregamento e descarregamento de máquinas e equipamentos, processo de soldagem e pintura pulverizada.
Em relação aos robôs industriais, pode-se afirmar
que:
Considere um robô planar com duas juntas rotativas (RR), em que o comprimento do primeiro link é L1 e o comprimento do segundo link é L2. A cinemática direta relaciona os ângulos das juntas (θ1 e θ2) com a posição do efetuador final no plano XY. Qual é a equação da cinemática direta que descreve a posição (x, y) do efetuador final em termos dos ângulos das juntas e dos comprimentos dos links?
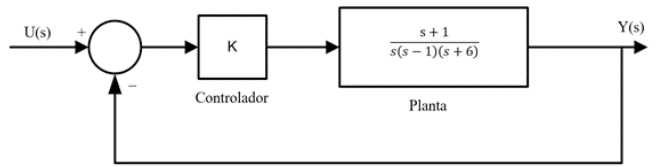
O diagrama de blocos a seguir representa uma planta de um motor de corrente contínua. Deseja-se
incluir um controlador que, ao adicionar um ganho, garante a estabilidade do sistema em malha fechada.
Determine a faixa de valores de ganho K, para que o sistema realimentado seja estável.
Fonte: IFSP, 2024
Memórias são dispositivos utilizados para
armazenar informações tais como números, letras,
endereços e instruções em forma de sinais digitais
por períodos curtos ou longos. A grande vantagem
dos sistemas digitais sobre os analógicos é a habilidade de armazenar grandes quantidades de informações digitais. Embora distingam-se pela sua
operação interna, as memórias têm princípios básicos de operação comuns. Seja uma memória de
32 x 4 que armazena 32 palavras de 4 bits, quais
as condições em cada entrada e saída quando a palavra de dados 0111 estiver sendo escrita no endereço 01100?
Um engenheiro de automação está desenvolvendo um sistema de controle para ajustar a temperatura de um forno industrial. Devido à complexidade das variações térmicas e às incertezas do processo, foi decidido utilizar um controlador fuzzy para otimizar o desempenho do sistema. Além disso, o engenheiro quer integrar técnicas de aprendizado de máquina para que o controlador possa se adaptar dinamicamente às condições do forno.
Com base nessa situação, qual das opções abaixo descreve corretamente uma vantagem da utilização de um controlador fuzzy adaptativo em comparação a um controlador fuzzy clássico?
I. Suporta a topologia de ligação em estrela. II. Suporta a topologia de ligação em barramento. III. Suporta a topologia de ligação ponto a ponto. IV. Pode ser utilizado com o modelo de comunicação mestre-escravo. V. Pode ser utilizado com o modelo de comunicação de passagem de token (token passing).
Quais estão corretas?
I. Sensores indutivos são sensores de proximidade. II. Sensores capacitivos são sensores de proximidade. III. Sensores de proximidade indutivos detectam alvos não metálicos. IV. Microchaves são sensores discretos e de proximidade. V. Sensores de proximidade permitem a operação sem contato mecânico.
Quais estão corretas?