Questões de Concurso
Sobre diagrama de blocos em engenharia eletrônica
Foram encontradas 108 questões
Com base nas funções de transferência da Figura 16, assinale a alternativa correta.

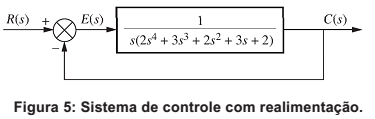
Um Engenheiro, ao analisar um projeto de sistema de controle com realimentação, deparou-se com o seguinte diagrama apresentado na Figura 5. Com base nas informações dessa figura, é correto afirmar que ela apresenta um sistema
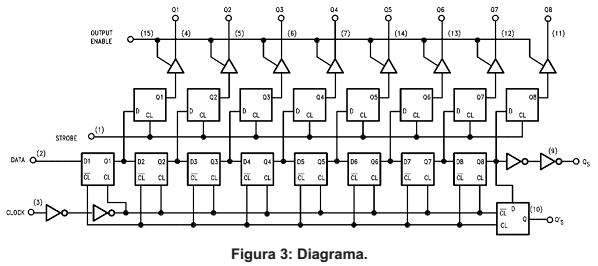
Ao analisar a Figura 3, um Engenheiro Eletricista constatou que essa figura mostra o diagrama de blocos de um
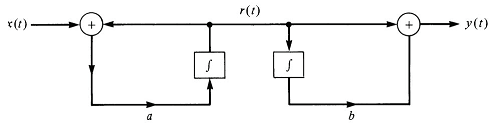
Um engenheiro de equipamentos está trabalhando em uma planta que pode ser representada pelo diagrama de blocos abaixo, em que r(t) e y(t) são a entrada e saída dessa planta, respectivamente.
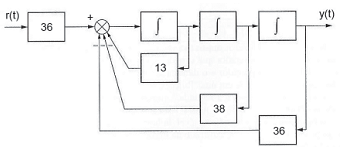
Após análise do diagrama, conclui-se que a função de
transferência do sistema é representada por
Considere o sistema de controle em malha fechada e a tabela de Routh-Hurwitz correspondente mostrados a seguir.
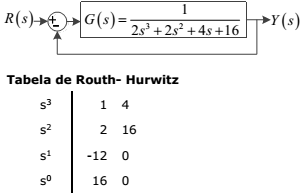
Considerando o sistema e a tabela apresentados
acima, assinale a afirmação verdadeira.
No diagrama de blocos representado abaixo, verificam-se os componentes principais de um sistema de controle realimentado.
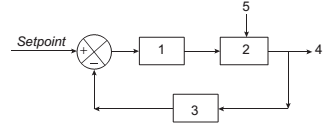
A sequência 1, 2, 3, 4 e 5 dos elementos indicados no
diagrama é, respectivamente,
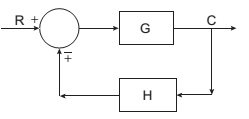
Um sistema de retroação unitária que pode ser apresentado
no lugar do sistema de retroação acima é:
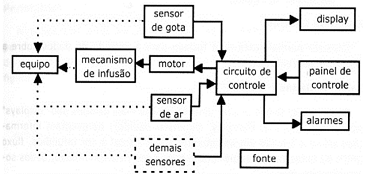
Qual equipamento está representado no seguinte diagrama em blocos?
Determine a relação entre Y e R no sistema a seguir.
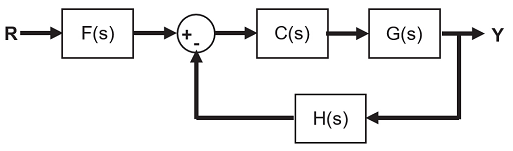

Os diagramas de bloco ilustrados acima representam sistemas lineares com realimentação negativa: o primeiro é um sistema de tempo contínuo e o segundo, de tempo discreto. No primeiro, e G(s) = s – b, em que b é uma constante real. No segundo,
e G(s) = s – b, em que b é uma constante real. No segundo, 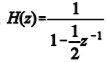 e G(z) = 1 – z–1. A respeito desses sistemas, julgue o item subsecutivo.
e G(z) = 1 – z–1. A respeito desses sistemas, julgue o item subsecutivo.
A função de transferência do sistema de tempo contínuo é
expressa por 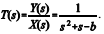
Os diagramas de bloco ilustrados acima representam sistemas lineares com realimentação negativa: o primeiro é um sistema de tempo contínuo e o segundo, de tempo discreto. No primeiro, e G(s) = s – b, em que b é uma constante real. No segundo, e G(z) = 1 – z–1. A respeito desses sistemas, julgue o item subsecutivo.
O sistema de tempo discreto é do tipo FIR (finite impulse
response, ou resposta finita ao impulso).
Os diagramas de bloco ilustrados acima representam sistemas lineares com realimentação negativa: o primeiro é um sistema de tempo contínuo e o segundo, de tempo discreto. No primeiro,  e G(s) = s – b, em que b é uma constante real. No segundo,
e G(s) = s – b, em que b é uma constante real. No segundo,  e G(z) = 1 – z–1. A respeito desses sistemas, julgue o item subsecutivo.
e G(z) = 1 – z–1. A respeito desses sistemas, julgue o item subsecutivo.
O sistema de tempo discreto é estável.
Os diagramas de bloco ilustrados acima representam sistemas lineares com realimentação negativa: o primeiro é um sistema de tempo contínuo e o segundo, de tempo discreto. No primeiro, e G(s) = s – b, em que b é uma constante real. No segundo, e G(z) = 1 – z–1. A respeito desses sistemas, julgue o item subsecutivo.
O sistema de tempo contínuo será instável se b for maior
que –1.
Considere o sistema apresentado abaixo. Suponha a=1 e b=2.
Determine a função de transferência do sistema. Este sistema é assintoticamente estável,
marginalmente estável ou instável?
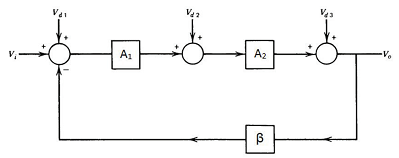
A realimentação negativa pode ser utilizada para reduzir a sensibilidade do sistema para certos tipos de distúrbios. Este tipo de vantagem é ilustrado na figura a seguir, que apresenta um sistema com 3 tipos distintos de distúrbios aplicados ao sistema. O distúrbio Vd1 é aplicado ao sistema junto com o sinal de entrada e está relacionado ao ruído associado ao próprio sinal de entrada. O distúrbio Vd2 é aplicado em um ponto médio do sistema e pode estar relacionado ao uma filtragem incorreta feita ao sinal proveniente da etapa inicial. Já o distúrbio Vd3 é aplicado na saída do sistema e pode estar relacionado com as mudanças da carga. Assim, analise, através da equação que relaciona Vo com Vi, A1 , A2 e β, se efeitos de distúrbio (Vd1, Vd2 e Vd3) serão reduzidos por conta da realimentação negativa. Considere que os ganhos de malha aberta A1 e A2 possuem valores muito altos e que β seja igual a 1.