Questões de Concurso
Sobre diagrama de blocos em engenharia eletrônica
Foram encontradas 111 questões
Ano: 2012
Banca:
CESPE / CEBRASPE
Órgão:
PEFOCE
Prova:
CESPE - 2012 - PEFOCE - Perito Criminal - Engenharia Elétrica |
Q805111
Engenharia Eletrônica

Os diagramas de bloco ilustrados acima representam sistemas lineares com realimentação negativa: o primeiro é um sistema de tempo contínuo e o segundo, de tempo discreto. No primeiro,  e G(s) = s – b, em que b é uma constante real. No segundo,
e G(s) = s – b, em que b é uma constante real. No segundo,  e G(z) = 1 – z–1. A respeito desses sistemas, julgue o item subsecutivo.
e G(z) = 1 – z–1. A respeito desses sistemas, julgue o item subsecutivo.
O sistema de tempo discreto é estável.
Ano: 2012
Banca:
CESPE / CEBRASPE
Órgão:
PEFOCE
Prova:
CESPE - 2012 - PEFOCE - Perito Criminal - Engenharia Elétrica |
Q805110
Engenharia Eletrônica
Os diagramas de bloco ilustrados acima representam sistemas lineares com realimentação negativa: o primeiro é um sistema de tempo contínuo e o segundo, de tempo discreto. No primeiro,  e G(s) = s – b, em que b é uma constante real. No segundo,
e G(s) = s – b, em que b é uma constante real. No segundo, 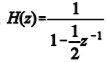 e G(z) = 1 – z–1. A respeito desses sistemas, julgue o item subsecutivo.
e G(z) = 1 – z–1. A respeito desses sistemas, julgue o item subsecutivo.
O sistema de tempo contínuo será instável se b for maior
que –1.
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2012 - Petrobras - Técnico de Projetos, Construção e Montagem Júnior - Eletrônica-2012 |
Q430251
Engenharia Eletrônica
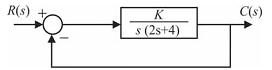
Considere a figura do diagrama de blocos de um sistema de controle do tipo proporcional.
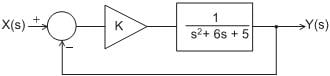
O valor limite do ganho K, acima do qual a função de transferência não apresentará polos reais, é
não apresentará polos reais, é
O valor limite do ganho K, acima do qual a função de transferência
não apresentará polos reais, é
Ano: 2012
Banca:
CESPE / CEBRASPE
Órgão:
TJ-RO
Prova:
CESPE - 2012 - TJ-RO - Analista Judiciário - Engenharia Elétrica |
Q275756
Engenharia Eletrônica
O diagrama de blocos ilustrado acima representa um sistema linear em tempo contínuo, em que R(s) é a entrada e C(s), a saída. Este diagrama permite obter informações da relação entrada-saída do sistema no domínio da frequência, de modo que é possível calcular a função de transferência H(s) = C(s)/R(s). Com relação a essas informações, assinale a opção correta.
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Elétrica |
Q264015
Engenharia Eletrônica
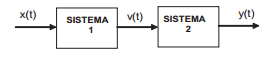
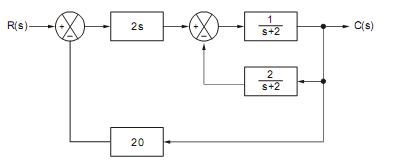
Considere o diagrama em blocos da figura acima, formado por dois sistemas lineares de 1a ordem, ligados em cascata. As equações diferenciais que representam a dinâmica desses sistemas são:

A expressão da função de transferência que liga a entrada X(s) à saída Y(s), dada por
 , é
, é
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Elétrica |
Q264013
Engenharia Eletrônica
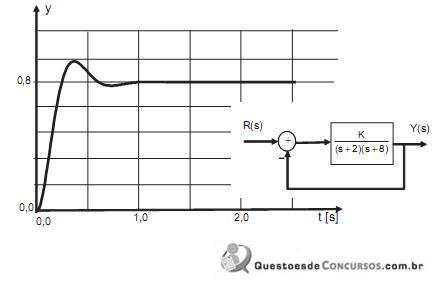
O gráfico da figura acima mostra a resposta ao degrau unitário aplicado sobre um sistema em malha fechada, cujo diagrama em blocos está representado na figura.
Com base nos dados do gráfico, o valor do ganho K é
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262971
Engenharia Eletrônica
Com o objetivo de facilitar o cálculo da função de transferência de um sistema complexo, é comum representá-lo pelo seu diagrama em blocos. Com base em seu diagrama original, é possível reorganizar ou rearranjar esses blocos obedecendo a regras específicas denominadas álgebra de blocos. Dessa forma, comparando-se as equações correspondentes, podem ser criados diagramas equivalentes.
O par que representa os diagramas em blocos original e equivalente é
O par que representa os diagramas em blocos original e equivalente é
Ano: 2012
Banca:
FCC
Órgão:
TRF - 2ª REGIÃO
Prova:
FCC - 2012 - TRF - 2ª REGIÃO - Analista Judiciário - Engenharia - Eletrônica |
Q243384
Engenharia Eletrônica
A figura abaixo corresponde ao diagrama em blocos de um sistema de controle:

A sua função de transferência é dada por:
A sua função de transferência é dada por:
Ano: 2012
Banca:
FCC
Órgão:
TRE-CE
Prova:
FCC - 2012 - TRE-CE - Analista Judiciário - Engenharia Elétrica |
Q220303
Engenharia Eletrônica
No sistema de controle abaixo, a função de transferência vale
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobras - Engenheiro de Equipamento Júnior - Eletrônica - 2011 |
Q431911
Engenharia Eletrônica

O diagrama em bloco acima mostra o modelo de um sistema linear, discreto e causal, no domínio da variável complexa z.
A função de transferência que relaciona a saída com a entrada é
A função de transferência que relaciona a saída com a entrada é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobras - Engenheiro de Equipamento Júnior - Eletrônica - 2011 |
Q431907
Engenharia Eletrônica
Texto associado
Considere o enunciado a seguir para responder às questões de nos 26 e 27.

O diagrama em blocos acima mostra o modelo simplificado de um motor DC. A saída é a velocidade angular [rad/s] representada pelo sinal Ω(s), e as entradas são: tensão na armadura V(s) e torque de carga T(s). Com base nesse diagrama:
Aplicando o princípio da superposição, qual a função de transferência que liga o torque de carga T(s) à velocidade angular Ω(s)?
Aplicando o princípio da superposição, qual a função de transferência que liga o torque de carga T(s) à velocidade angular Ω(s)?
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobras - Engenheiro de Equipamento Júnior - Eletrônica - 2011 |
Q431906
Engenharia Eletrônica
Texto associado
Considere o enunciado a seguir para responder às questões de nos 26 e 27.
O diagrama em blocos acima mostra o modelo simplificado de um motor DC. A saída é a velocidade angular [rad/s] representada pelo sinal Ω(s), e as entradas são: tensão na armadura V(s) e torque de carga T(s). Com base nesse diagrama:
Aplicando o princípio da superposição, qual a função de transferência que liga a tensão da armadura V(s) à velocidade angular Ω(s)?
Aplicando o princípio da superposição, qual a função de transferência que liga a tensão da armadura V(s) à velocidade angular Ω(s)?
Ano: 2011
Banca:
CESGRANRIO
Órgão:
PETROQUÍMICA SUAPE
Prova:
CESGRANRIO - 2011 - PETROQUÍMICA SUAPE - Engenheiro de Manutenção Pleno - Elétrica |
Q187365
Engenharia Eletrônica

Para um dado valor de K, os polos complexos do sistema em malha fechada estão exatamente sobre o eixo imaginário. Assim sendo, haverá uma oscilação na saída do sistema, cuja frequência, em rad/s, é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
PETROQUÍMICA SUAPE
Prova:
CESGRANRIO - 2011 - PETROQUÍMICA SUAPE - Engenheiro de Manutenção Pleno - Elétrica |
Q187364
Engenharia Eletrônica
Qual o valor do ganho K para que o sistema em malha fechada esteja no limiar da instabilidade?
Ano: 2011
Banca:
CESGRANRIO
Órgão:
PETROQUÍMICA SUAPE
Prova:
CESGRANRIO - 2011 - PETROQUÍMICA SUAPE - Instrumentista |
Q186389
Engenharia Eletrônica
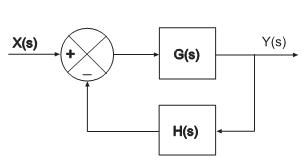
A figura acima representa um diagrama de blocos. A esse respeito, a função de transferência de malha fechada [Y(S)/X(S)] correspondente a esse diagrama é
Q183716
Engenharia Eletrônica
Texto associado

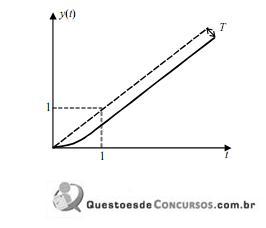
Considere o sistema representado pelo diagrama de blocos acima,
no qual se tem uma planta, um controlador e uma malha de
realimentação. Nesse diagrama, T representa uma constante e s é o
operador da transformada de Laplace. Acerca desse sistema, julgue
os itens subsequentes.
Considere o sistema representado pelo diagrama de blocos acima,
no qual se tem uma planta, um controlador e uma malha de
realimentação. Nesse diagrama, T representa uma constante e s é o
operador da transformada de Laplace. Acerca desse sistema, julgue
os itens subsequentes.
No domínio do tempo, a resposta do sistema em tela a uma entrada com forma de rampa unitária (linha pontilhada no gráfico abaixo) terá a forma da curva em linha contínua mostrada nesse mesmo gráfico.
Q183715
Engenharia Eletrônica
Texto associado
Considere o sistema representado pelo diagrama de blocos acima,
no qual se tem uma planta, um controlador e uma malha de
realimentação. Nesse diagrama, T representa uma constante e s é o
operador da transformada de Laplace. Acerca desse sistema, julgue
os itens subsequentes.
Considere o sistema representado pelo diagrama de blocos acima,
no qual se tem uma planta, um controlador e uma malha de
realimentação. Nesse diagrama, T representa uma constante e s é o
operador da transformada de Laplace. Acerca desse sistema, julgue
os itens subsequentes.
A malha de realimentação de controle, conforme o diagrama de bloco, assegura a estabilidade do sistema.
Q183713
Engenharia Eletrônica
Texto associado
Considere o sistema representado pelo diagrama de blocos acima,
no qual se tem uma planta, um controlador e uma malha de
realimentação. Nesse diagrama, T representa uma constante e s é o
operador da transformada de Laplace. Acerca desse sistema, julgue
os itens subsequentes.
Considere o sistema representado pelo diagrama de blocos acima,
no qual se tem uma planta, um controlador e uma malha de
realimentação. Nesse diagrama, T representa uma constante e s é o
operador da transformada de Laplace. Acerca desse sistema, julgue
os itens subsequentes.
O erro no sistema alimenta um controlador proporcional de ganho unitário.
Q183712
Engenharia Eletrônica
Texto associado
Considere o sistema representado pelo diagrama de blocos acima,
no qual se tem uma planta, um controlador e uma malha de
realimentação. Nesse diagrama, T representa uma constante e s é o
operador da transformada de Laplace. Acerca desse sistema, julgue
os itens subsequentes.
Considere o sistema representado pelo diagrama de blocos acima,
no qual se tem uma planta, um controlador e uma malha de
realimentação. Nesse diagrama, T representa uma constante e s é o
operador da transformada de Laplace. Acerca desse sistema, julgue
os itens subsequentes.
A planta do sistema é linear, consistindo em um sistema de primeira ordem. Apesar de essa planta estar sob a ação de uma malha de controle, formando um sistema em malha fechada, o sistema global também é linear e de primeira ordem.
Q183711
Engenharia Eletrônica
Texto associado
Considere o sistema representado pelo diagrama de blocos acima,
no qual se tem uma planta, um controlador e uma malha de
realimentação. Nesse diagrama, T representa uma constante e s é o
operador da transformada de Laplace. Acerca desse sistema, julgue
os itens subsequentes.
Considere o sistema representado pelo diagrama de blocos acima,
no qual se tem uma planta, um controlador e uma malha de
realimentação. Nesse diagrama, T representa uma constante e s é o
operador da transformada de Laplace. Acerca desse sistema, julgue
os itens subsequentes.
Considerando que o sistema em tela utiliza um controlador do tipo proporcional, para reduzir o erro estacionário nesse processo, um procedimento recomendado é a substituição desse controlador por outro, mas do tipo derivativo.