Questões de Concurso
Sobre diagrama de blocos em engenharia eletrônica
Foram encontradas 110 questões
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobras - Engenheiro de Equipamento Júnior - Elétrica |
Q183044
Engenharia Eletrônica

A figura acima mostra um diagrama em blocos, no domínio de Laplace, contendo um bloco de retardo, um somador e um integrador. Aplicando um impulso unitário d(t) na entrada, a forma de onda da saída h(t) é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobras - Técnico de Manutenção Júnior - Eletrônica |
Q182394
Engenharia Eletrônica
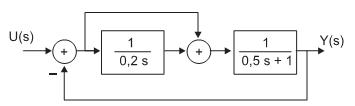
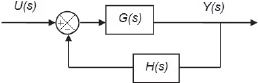
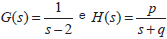
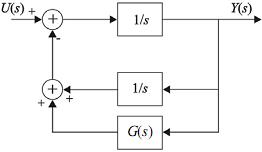
O diagrama em blocos da figura acima mostra um sistema linear com entrada U(s) e saída Y(s). Com base nos dados do diagrama, os polos desse sistema em malha fechada são
Ano: 2011
Banca:
FCC
Órgão:
TRT - 23ª REGIÃO (MT)
Prova:
FCC - 2011 - TRT - 23ª REGIÃO (MT) - Analista Judiciário - Engenharia Elétrica |
Q180891
Engenharia Eletrônica

No sistema de controle abaixo, A, B e C são funções no domínio s. A função de transferência F(s) = S(s) / E(s) é dada por
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Elétrica |
Q180140
Engenharia Eletrônica

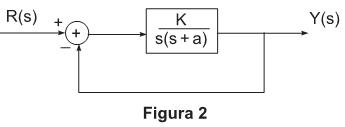
Considere o diagrama de realimentação mostrado na Figura 2, onde o ganho K varia positivamente até os polos alcançarem as posições mostradas na Figura 1. Os valores de a e K são, respectivamente,
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Elétrica |
Q180137
Engenharia Eletrônica

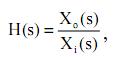
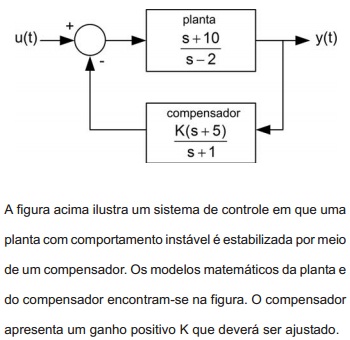
A figura acima mostra uma estrutura de controle em malha fechada, onde G(s) corresponde a uma planta que se deseja controlar com uma realimentação de saída através de um compensador H(s). Com base no diagrama, a função de transferência de malha fechada é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Elétrica |
Q180134
Engenharia Eletrônica

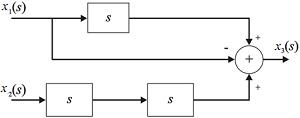
O diagrama em bloco da figura acima é a representação de um sistema linear, com entrada X(s) e saída Y(s), modelado no domínio de Laplace. A expressão de Y(s) é
Ano: 2011
Banca:
CESPE / CEBRASPE
Órgão:
Correios
Prova:
CESPE - 2011 - Correios - Analista de Correios - Engenheiro - Engenharia Eletrônica |
Q132668
Engenharia Eletrônica
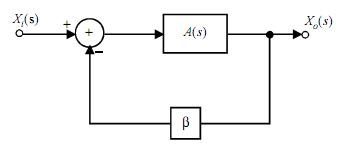
Considere a figura acima, que representa o diagrama de um sistema linear com realimentação, cuja função de transferência em malha aberta é A(s), em que a frequência no domínio da transformada de Laplace é s, e a entrada e a saída desse sistema são representadas, respectivamente, por
 Considerando essas informações, julgue o próximo item.
Considerando essas informações, julgue o próximo item.A função de transferência,
 do sistema acima representado é dada por
do sistema acima representado é dada por 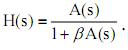
Ano: 2011
Banca:
CESPE / CEBRASPE
Órgão:
TJ-ES
Prova:
CESPE - 2011 - TJ-ES - Analista Judiciário - Engenharia Elétrica - Específicos |
Q103757
Engenharia Eletrônica
Texto associado
Um sistema de controle é formado por componentes físicos,
conectados ou relacionados de maneira a comandar, dirigir ou
regular a si mesmo ou a outros sistemas. Os sistemas de controle
podem ser classificados, de forma geral, em sistemas de malha
aberta e de malha fechada e sistemas digitais e analógicos. Com
relação a esse assunto, julgue os itens subsequentes.
conectados ou relacionados de maneira a comandar, dirigir ou
regular a si mesmo ou a outros sistemas. Os sistemas de controle
podem ser classificados, de forma geral, em sistemas de malha
aberta e de malha fechada e sistemas digitais e analógicos. Com
relação a esse assunto, julgue os itens subsequentes.
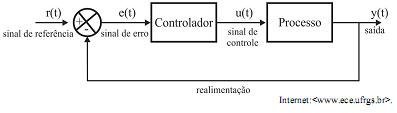
A figura abaixo mostra um sistema de controle de malha aberta.
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Elétrica |
Q573199
Engenharia Eletrônica
Calcule as constantes reais p e q de forma que os pólos da função de transferência em malha fechada, conforme representado na figura, correspondam aos complexos conjugados −3± i .
Dados:
Assinale a alternativa correta.
Dados:
Assinale a alternativa correta.
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Elétrica |
Q573197
Engenharia Eletrônica
Analise o diagrama de blocos a seguir, no qual G1, G2, G3, H1 e H2 são funções transferência.
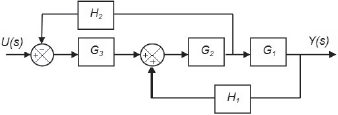
Considerando a entrada (U(s)) e a saída (Y(s)), a função transferência resultante equivalente a estrutura dos blocos da figura é:
Considerando a entrada (U(s)) e a saída (Y(s)), a função transferência resultante equivalente a estrutura dos blocos da figura é:
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Eletrônica |
Q569039
Engenharia Eletrônica
Texto associado
Uma planta industrial é composta por dois equipamentos que possuem modelos lineares ideais G1(s) e G2(s).
A montagem é feita de forma que a saída de G1(s) é a entrada de G2(s), conforme ilustra a figura.

Para as funções de transferências definidas por afirma-se:
afirma-se:
I. Para uma entrada R(s) limitada, a saída Y(s) também é limitada (BIBO estabilidade)
PORQUE
II. O produto de G1(s) por G2(s) resulta em uma função de transferência estável.
A montagem é feita de forma que a saída de G1(s) é a entrada de G2(s), conforme ilustra a figura.
Para as funções de transferências definidas por
afirma-se:I. Para uma entrada R(s) limitada, a saída Y(s) também é limitada (BIBO estabilidade)
PORQUE
II. O produto de G1(s) por G2(s) resulta em uma função de transferência estável.
Assinale:
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador Tecnologista em Metrologia e Qualidade - Informática Aplicada à Metrologia Legal |
Q449576
Engenharia Eletrônica
O estudo de sistemas de controle em malha-fechada envolve, geralmente, o uso de álgebra de diagrama de blocos, que permite avaliar um sistema de forma simples, contemplando os aspectos globais da resposta do sistema. A figura acima mostra o diagrama de blocos da planta de um sistema de controle em malha-fechada, representado no domínio da variável complexa da transformada de Laplace. Aplicando-se as operações de simplificação de diagrama de blocos, obteve-se que a função de transferência desse sistema é dada por
 .
. Com base nessas informações, é correto concluir que a função de transferência
 é dada por
é dada por
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador Tecnologista em Metrologia e Qualidade - Informática Aplicada à Metrologia Legal |
Q449572
Engenharia Eletrônica
O diagrama de blocos acima representa, no domínio da variável complexa s da transformada de Laplace, um sistema de controle com duas entradas,
 e
e  , e uma saída,
, e uma saída,  .
. Considerando que as condições iniciais para as variáveis
 ,
,  e
e  são nulas para t = 0 , a equação no domínio do tempo que descreve esse sistema, para t > 0, é
são nulas para t = 0 , a equação no domínio do tempo que descreve esse sistema, para t > 0, é
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
ABIN
Prova:
CESPE - 2010 - ABIN - Oficial Técnico de Inteligência – Área de Engenharia Elétrica |
Q184702
Engenharia Eletrônica
Texto associado

O diagrama de bloco mostrado na figura acima ilustra a entrada
X(s) e a saída Y(s) de um sistema dinâmico, cuja função de
transferência é H(s). Considere que, à entrada do sistema, seja
aplicado um impulso unitário X(s) = 1, sendo então observada a
resposta Y(s) resultante. Considere, ainda, que a transformada de
Laplace Y(s) do sinal observado nos terminais de saída possua zeros

= –5, e que Y(s) represente uma tensão e Y(2) = 0,5 V.
Com base nessas considerações, julgue os seguintes itens.
O diagrama de bloco mostrado na figura acima ilustra a entrada
X(s) e a saída Y(s) de um sistema dinâmico, cuja função de
transferência é H(s). Considere que, à entrada do sistema, seja
aplicado um impulso unitário X(s) = 1, sendo então observada a
resposta Y(s) resultante. Considere, ainda, que a transformada de
Laplace Y(s) do sinal observado nos terminais de saída possua zeros
= –5, e que Y(s) represente uma tensão e Y(2) = 0,5 V.
Com base nessas considerações, julgue os seguintes itens.
Em regime permanente, a amplitude do sinal de saída é dada por y(t → ∞ ) =  V.
V.
V.
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador - Engenharia Eletrônica |
Q112748
Engenharia Eletrônica

Na situação acima, para que o sistema em malha fechada seja estável e sobreamortecido, o valor de k1 deve ser
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador - Engenharia Eletrônica |
Q112745
Engenharia Eletrônica
Um sistema dinâmico linear, causal e invariante no tempo, é modelado pela função de transferência G (s) =  , no SI. Deseja-se implementar um controlador proporcional para esse sistema, segundo o diagrama de blocos mostrado abaixo, em que X(s) e Y(s) representam a transformada de Laplace da entrada e da saída do sistema em malha fechada, respectivamente, e kp é o ganho
, no SI. Deseja-se implementar um controlador proporcional para esse sistema, segundo o diagrama de blocos mostrado abaixo, em que X(s) e Y(s) representam a transformada de Laplace da entrada e da saída do sistema em malha fechada, respectivamente, e kp é o ganho
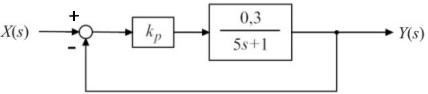
Considerando essas informações, assinale a opção que apresenta o valor do ganho kp de forma que a constante de tempo em malha fechada, no diagrama mostrado, seja de meio segundo.
, no SI. Deseja-se implementar um controlador proporcional para esse sistema, segundo o diagrama de blocos mostrado abaixo, em que X(s) e Y(s) representam a transformada de Laplace da entrada e da saída do sistema em malha fechada, respectivamente, e kp é o ganhoConsiderando essas informações, assinale a opção que apresenta o valor do ganho kp de forma que a constante de tempo em malha fechada, no diagrama mostrado, seja de meio segundo.
Ano: 2010
Banca:
FCC
Órgão:
TRT - 8ª Região (PA e AP)
Prova:
FCC - 2010 - TRT - 8ª Região (PA e AP) - Analista Judiciário - Engenharia Elétrica |
Q82736
Engenharia Eletrônica
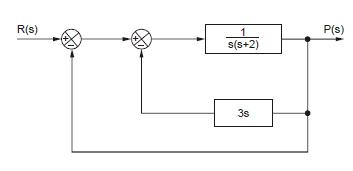
A função de transferência F(s) = P(s)/R(s) do sistema de controle abaixo é dada por:
Ano: 2010
Banca:
CESGRANRIO
Órgão:
IBGE
Prova:
CESGRANRIO - 2010 - IBGE - Analista de Planejamento - Engenharia Elétrica |
Q74515
Engenharia Eletrônica
Verifica-se que para um determinado valor de K, o sistema em malha fechada apresenta um polo localizado em s = -8 . Este valor é
Ano: 2010
Banca:
CESGRANRIO
Órgão:
IBGE
Prova:
CESGRANRIO - 2010 - IBGE - Analista de Planejamento - Engenharia Elétrica |
Q74514
Engenharia Eletrônica
Aumentando-se o valor de K a partir de zero, o valor limite em que o sistema passará a ter um comportamento estável é
Ano: 2010
Banca:
CESGRANRIO
Órgão:
IBGE
Prova:
CESGRANRIO - 2010 - IBGE - Analista de Planejamento - Engenharia Elétrica |
Q74513
Engenharia Eletrônica
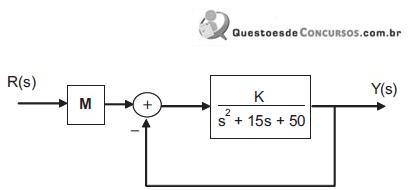
A figura acima apresenta o diagrama em blocos de um sistema de controle em malha fechada. Para que no domínio do tempo a saída y(t) siga a entrada de referência r(t), do tipo degrau, com erro de estado estacionário NULO, a expressão do ganho M será