Questões de Concurso
Sobre função de transferência em engenharia eletrônica
Foram encontradas 237 questões
G(s) = 9 /s2 + 6s + 9
A partir da análise de estabilidade e de desempenho, afirma-se que G(s) é
Considere as informações a seguir para responder à questão.
O controle de atitude de um satélite em órbita consiste em ajustar, automaticamente, o ângulo de seu eixo, de modo a direcionar sua antena para a região desejada na superfície da Terra. O modelo simplificado desse sistema consta de um sinal de entrada, que é o torque τ(t), e de um sinal de saída, que é o ângulo θ(t). Considerando o vetor de estado X(t)=  definido com x1(t) =
definido com x1(t) =  (t) , posição angular e x2(t) = (t) = dθ / dt , a velocidade angular, obtém-se o seguinte modelo em espaço de estado.
(t) , posição angular e x2(t) = (t) = dθ / dt , a velocidade angular, obtém-se o seguinte modelo em espaço de estado.
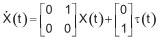 e y(t) = [1,0] x(t)
e y(t) = [1,0] x(t)
Discretizando este modelo, pelo método ZOH, com o período de amostragem T, obtém-se o modelo discreto dado por:
X(k + 1)= ΦX(k) + Γτ(k) e y(k) = CX(k)
A matriz Φ é
 , onde
, onde •ζ = cos (Φ) é a razão de amortecimento; e
• ωn é a frequência natural não amortecida.
Para discretizar esse sistema e aplicar um controle digital, o período de amostragem deve ser tal que ocorram 10 amostras durante o tempo de subida. O valor aproximado desse período é


Os valores de p e z são, respectivamente,
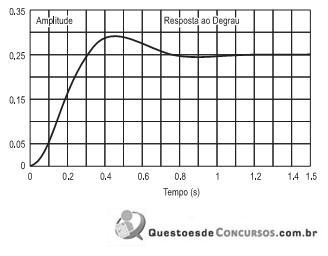
O gráfico da figura acima corresponde à resposta ao degrau unitário de um sistema de 2ª ordem, cuja função de transferência é
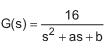 . Com base nos dados da figura, o valor da Frequência Natural Não Amortecida é
. Com base nos dados da figura, o valor da Frequência Natural Não Amortecida é


A função de transferência que liga a saída Y(s) à entrada X(s) é
O polinômio do denominador da função de transferência de um sistema em malha fechada é dado por
s³ + 12 s² + 44 s + 48 + K.
Variando positivamente o valor de K até o sistema entrar em oscilação pura (limiar da instabilidade), o valor da frequência de oscilação, em rad/s, é

O circuito da figura acima é composto por um amplificador operacional considerado ideal. Para que a função de transferência desse circuito seja
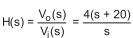 , os valores de R, em O, e C, em F, devem ser, respectivamente
, os valores de R, em O, e C, em F, devem ser, respectivamente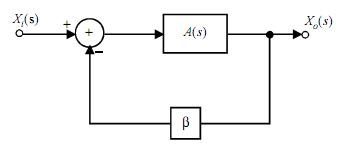
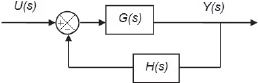
Considere a figura acima, que representa o diagrama de um sistema linear com realimentação, cuja função de transferência em malha aberta é A(s), em que a frequência no domínio da transformada de Laplace é s, e a entrada e a saída desse sistema são representadas, respectivamente, por
 Considerando essas informações, julgue o próximo item.
Considerando essas informações, julgue o próximo item.A função de transferência,
 do sistema acima representado é dada por
do sistema acima representado é dada por 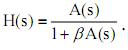

Julgue os itens que se seguem, referentes ao circuito elétrico
apresentado na figura acima, em que a entrada,
 é uma tensão
é uma tensãosenoidal com frequência angular ω.

digitalizados — ou seja, convertido em sinais digitais — para que
possam ser processados em um computador ou microprocessador
A respeito de conceitos referentes à digitalização de sinais e a
sistemas de processamento digital de sinais, julgue os próximos
itens.
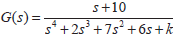 , na qual
, na qual  .
.Assinale a alternativa que determine qual(is) valor(es) de k a função de transferência G(s) tem os pólos alocados no semi-plano da esquerda.
Dados:
Assinale a alternativa correta.
Um sistema linear é modelado pelas seguintes equações

em que as constantes  e as variáveis físicas
e as variáveis físicas  .
.
A entrada do sistema é u(t) e a saída medida é y(t).
 desse sistema é:
desse sistema é:
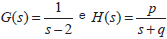
Considerando a entrada (U(s)) e a saída (Y(s)), a função transferência resultante equivalente a estrutura dos blocos da figura é:
A montagem é feita de forma que a saída de G1(s) é a entrada de G2(s), conforme ilustra a figura.

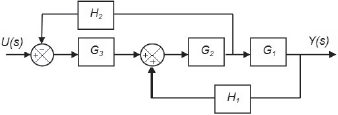
Para as funções de transferências definidas por
 afirma-se:
afirma-se:I. Para uma entrada R(s) limitada, a saída Y(s) também é limitada (BIBO estabilidade)
PORQUE
II. O produto de G1(s) por G2(s) resulta em uma função de transferência estável.
Sobre a estabilidade das funções de transferência
 e
e 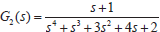 é correto afirmar que:
é correto afirmar que: