Questões de Concurso
Sobre função de transferência em engenharia eletrônica
Foram encontradas 236 questões
O ganho DC da função de transferência G(s) é menor que 2.
O sistema representado por G(s) é controlável.
Um sistema cuja resposta ao impulso seja dada pela função h(t) = e-t sen(3t), em que t é uma variável temporal contínua, será instável em regime permanente.
Na expansão em frações parciais da função de transferência Y (S) = - (S2 + S - 1)/ S (S + 1)(S + 2) o coeficiente da parcela do polo real igual a -1 será maior que 3.
 do sistema, presente na figura abaixo, é dada por
do sistema, presente na figura abaixo, é dada por 
 . Se a entrada para o sistema tem valor igual a 10 (constante), então a resposta forçada do sistema será
. Se a entrada para o sistema tem valor igual a 10 (constante), então a resposta forçada do sistema será  .
.
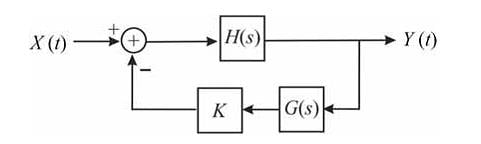
Os diagramas de bloco ilustrados acima representam sistemas lineares com realimentação negativa: o primeiro é um sistema de tempo contínuo e o segundo, de tempo discreto. No primeiro, e G(s) = s – b, em que b é uma constante real. No segundo,
e G(s) = s – b, em que b é uma constante real. No segundo, 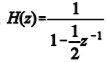 e G(z) = 1 – z–1. A respeito desses sistemas, julgue o item subsecutivo.
e G(z) = 1 – z–1. A respeito desses sistemas, julgue o item subsecutivo.
A função de transferência do sistema de tempo contínuo é
expressa por 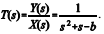
Os diagramas de bloco ilustrados acima representam sistemas lineares com realimentação negativa: o primeiro é um sistema de tempo contínuo e o segundo, de tempo discreto. No primeiro, e G(s) = s – b, em que b é uma constante real. No segundo, e G(z) = 1 – z–1. A respeito desses sistemas, julgue o item subsecutivo.
O sistema de tempo discreto é do tipo FIR (finite impulse
response, ou resposta finita ao impulso).
Os diagramas de bloco ilustrados acima representam sistemas lineares com realimentação negativa: o primeiro é um sistema de tempo contínuo e o segundo, de tempo discreto. No primeiro,  e G(s) = s – b, em que b é uma constante real. No segundo,
e G(s) = s – b, em que b é uma constante real. No segundo,  e G(z) = 1 – z–1. A respeito desses sistemas, julgue o item subsecutivo.
e G(z) = 1 – z–1. A respeito desses sistemas, julgue o item subsecutivo.
O sistema de tempo discreto é estável.
Os diagramas de bloco ilustrados acima representam sistemas lineares com realimentação negativa: o primeiro é um sistema de tempo contínuo e o segundo, de tempo discreto. No primeiro, e G(s) = s – b, em que b é uma constante real. No segundo, e G(z) = 1 – z–1. A respeito desses sistemas, julgue o item subsecutivo.
O sistema de tempo contínuo será instável se b for maior
que –1.

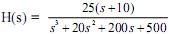
Leve em conta a planta de controle cujo modelo de malha aberta, em função de transferência no domínio de Laplace, é dado por:
 .
.Para um certo valor do ganho K, foi traçado o esboço aproximado do diagrama de Bode, em amplitude e fase, da função G(s), representado na figura acima.
Leve em conta a planta de controle cujo modelo de malha aberta, em função de transferência no domínio de Laplace, é dado por:
.Para um certo valor do ganho K, foi traçado o esboço aproximado do diagrama de Bode, em amplitude e fase, da função G(s), representado na figura acima.
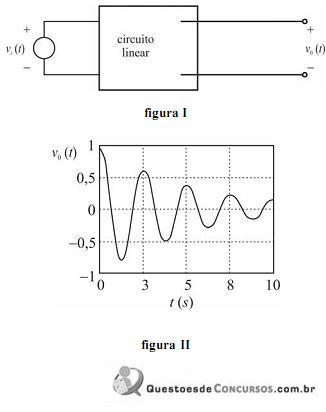
O circuito linear ilustrado na figura I acima pode ser interpretado como um quadripolo com uma porta de entrada e uma porta de saída. Quando a porta de entrada é excitada com uma tensão vi (t) impulsiva, observa-se, na porta de saída, a tensão v0(t), para t > 0, representada pelo sinal esboçado na figura II. Considerando que o circuito é de segunda ordem, é correto afirmar que, no plano complexo, o sistema tem
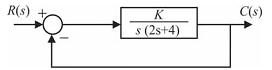
O diagrama de blocos ilustrado acima representa um sistema linear em tempo contínuo, em que R(s) é a entrada e C(s), a saída. Este diagrama permite obter informações da relação entrada-saída do sistema no domínio da frequência, de modo que é possível calcular a função de transferência H(s) = C(s)/R(s). Com relação a essas informações, assinale a opção correta.
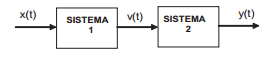
Considere o diagrama em blocos da figura acima, formado por dois sistemas lineares de 1a ordem, ligados em cascata. As equações diferenciais que representam a dinâmica desses sistemas são:

A expressão da função de transferência que liga a entrada X(s) à saída Y(s), dada por
 , é
, éConsiderando-se que o numerador da função de transferência é um valor constante, qual a faixa de variação do ganho K que garante a estabilidade do sistema?
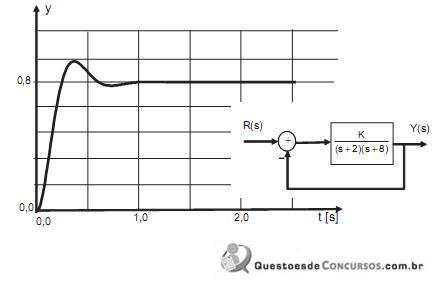
O gráfico da figura acima mostra a resposta ao degrau unitário aplicado sobre um sistema em malha fechada, cujo diagrama em blocos está representado na figura.
Com base nos dados do gráfico, o valor do ganho K é
O par que representa os diagramas em blocos original e equivalente é
Dentro desse contexto, sabendo-se que um dado sistema apresenta a seguinte função de transferência

quais os valores de seus polos?