Questões de Concurso
Sobre função de transferência em engenharia eletrônica
Foram encontradas 238 questões
Considere um sistema linear, contínuo e invariante no tempo, submetido a uma realimentação proporcional de saída. A função de transferência em malha fechada é K/s3 +102 +15s + K , em que K > 0 é o ganho proporcional de realimentação.
Qual o valor do ganho K no limiar da instabilidade desse
sistema em malha fechada?
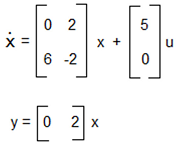
A partir de um sistema definido pelas seguintes equações no espaço de estados:
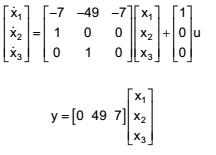
Conclui-se que a função de transferência equivalente do
sistema é
Um engenheiro deseja alocar os polos do sistema, representado pelas equações de estado abaixo, para as posições -1, -3 e -6.
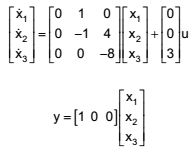
Levando-se em conta a função de transferência equivalente do sistema, qual o controlador K de realimentação de estados
que esse engenheiro deve projetar?
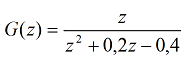
Considere o sinal a seguir:
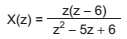
A inversa Z desse sinal é:
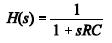
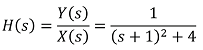
Parte de um sistema industrial possui a função de transferência mostrada abaixo.
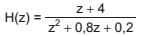
O sistema representado pela função de transferência é um sistema BIBO
Dados:
√2 = 1,4
√10 = 3,16
A função de transferência de um circuito é dada por  .
.


A figura abaixo mostra o diagrama de blocos de um oscilador de realimentação. A respeito dos ganhos promovidos nos blocos A e B, podemos afirmar, segundo os critérios de Barkhausen, sobre a saída Vs:
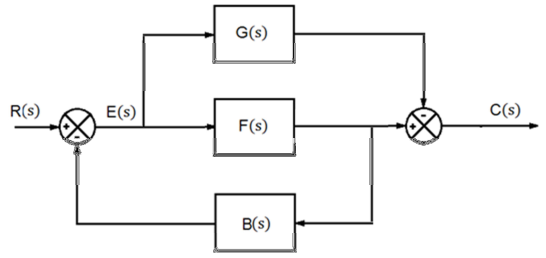
Para o sistema mostrado na figura abaixo, pode-se afirmar que a função de transferência de malha fechada C(s)/R(s) é
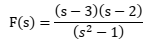
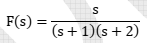
Na função de transferência abaixo, os zeros finitos desta função são
Em um sistema de controle de processo com retroalimentação, pode-se afirmar que:
I – o sinal de saída referente é sempre mensurado e comparado com o sinal de entrada de referência, possibilitando, assim, um ajuste do controle, tornando o processo mais estável;
II – o controle de processo por retroalimentação não depende do sinal de saída do processo;
III – o sinal de entrada é comparado com um valor de referência fixo, aumentando, assim, a estabilidade do sistema.
Está correto o que se afirma em
Quando se deseja analisar sistemas de controle em relação aos seus aspectos temporais, a transformada inversa de Laplace se faz necessária. Neste sentido, na função de transferência abaixo, no domínio da frequência, a fórmula que representa a equação no domínio do tempo é
Um sistema de entrada única e saída única é representado em espaço de estado pela equação
A função de transferência G(s) do sistema é:
Considerando que a função de transferência à Malha Fechada de um sistema de controle digital é dada pela expressão abaixo, assinale a alternativa correta quanto à condição de estabilidade do sistema e os valores dos polos.
Em relação a controles e sistemas lineares, não lineares e digitais, julgue o seguinte item.
Em um sistema linear cuja função de transferência seja
dada por G(s) = B(s)/A(s), os polos do sistema serão
sempre dados pelos coeficientes do polinômio A(s).
Considere a seguinte função de transferência:
Considerando-se x(t)=u(t), determine, a partir de y(t), a resposta do sistema em estado estacionário.
Considere o sistema apresentado abaixo. Suponha a=1 e b=2.
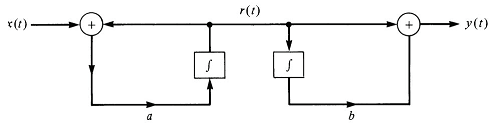
Determine a função de transferência do sistema. Este sistema é assintoticamente estável,
marginalmente estável ou instável?
A função de transferência de malha fechada de um sistema de controle é dada por

Este sistema possui, respectivamente, quantos polos e zeros finitos?