Questões de Concurso
Sobre função de transferência em engenharia eletrônica
Foram encontradas 238 questões
O mapa de polos e zeros de um sistema é mostrado na figura a seguir.

Em relação à figura, assinale V (verdadeiro) ou F (falso) nas afirmativas seguintes.
(__) O sistema tem três polos e quatro zeros.
(__) O sistema é instável.
(__) O sistema tem ao menos um polo estável.
(__) O sistema tem quatro zeros de fase não mínima.
A sequência correta é
Utilize a figura a seguir para responder à questão.

A figura ilustra um diagrama de blocos de um sistema linear
com realimentação negativa, sendo o ganho do percurso
direto igual a G(s) 2/S+3', e o ganho do percurso de
realimentação igual a H(s) = 1/S.
Utilize a figura a seguir para responder à questão.
A figura ilustra um diagrama de blocos de um sistema linear
com realimentação negativa, sendo o ganho do percurso
direto igual a G(s) 2/S+3', e o ganho do percurso de
realimentação igual a H(s) = 1/S.

Após análise do sistema, os zeros da função de transferência desse sistema de controle valem
Ao ser aplicado um Impulso Unitário na entrada desse sistema, o sinal de saída oscilará na forma de uma senoide exponencialmente amortecida.
Dessa forma, pelo exposto acima, a constante conhecida como Razão de Amortecimento desse sistema vale
Um circuito elétrico é composto por uma fonte de tensão vF(t) que alimenta três componentes considerados ideais: um resistor de resistência R, um capacitor de capacitância C e um indutor de indutância L, todos associados em série. Fechando o circuito da fonte sobre esses três componentes ligados em série, uma corrente i(t) vai circular. A dinâmica desse sistema é regida por uma equação diferencial, obtida pela lei de Kirchoff, que relaciona a soma das tensões nesta malha: vF(t) = vR(t) + vC(t) + vL (t).
As relações entre as tensões e a corrente da malha são:

Com base nos dados, considerando-se todas as condições iniciais nulas, qual é a expressão da Função de Transferência,
no domínio de Laplace, que liga a corrente elétrica de saída com a tensão da fonte de alimentação, ou seja, a expressão
de 
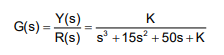
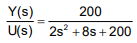
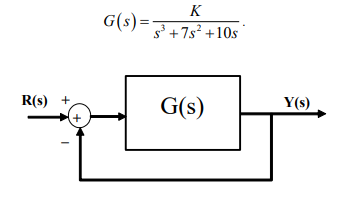
Esse modelo relaciona a saída Y(s) do sistema, com a entrada de referência R(s) e apresenta, no domínio do tempo, o sinal de saída y(t) em função do sinal de entrada r(t).
Variando-se positivamente o ganho K, chega-se a um determinado valor que provoca uma oscilação pura no sinal de saída y(t), ou seja, o sistema, em MF, passa a ter dois polos imaginários puros.
Qual é o valor do ganho K para obtenção dessa oscilação senoidal com valor de pico constante?
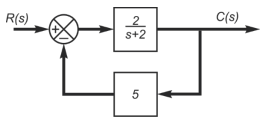
Assinale a alternativa que indica corretamente a função de transferência C(s)/R(s) do sistema.
Y(s) / U(s) = 2 / s3 + 6s2 + 11s + 6
Assumindo condições iniciais nulas, assinale a alternativa que corresponde às matrizes do modelo matemático do sistema em sua representação em espaço de estados.
C(s) = 2 ( s + 4 / s + 8 )
Analisando a estrutura de C(s), pode-se afirmar que a compensação é do tipo:
H(s) = ωn2 / s2 + 2ζωns + ωn2
Onde ωn e ζ são denominados de frequência natural e coeficiente de amortecimento, respectivamente. Acerca da natureza da resposta transitória desse sistema, analise as assertivas abaixo e assinale a alternativa correta.
I. O sistema apresenta uma resposta ao degrau unitário subamortecida se 0 < ζ < 1.
II. O sistema apresenta uma resposta ao degrau unitário oscilatória se ζ > 1.
III. Se o sistema possui polos com parte real negativa e iguais, a resposta ao degrau unitário será superamortecida.
H(s) = s2 + 4s + 4 / s3 + 8s2 + 9s + 8
Dada a função de transferência
G (s) = 1/ s2+s-12 , podemos afirmar que os polos são:
I. Quanto mais à esquerda estiver localizado o polo, mais lenta será a componente da resposta no tempo. II. Os zeros de uma função de transferência diminuem o efeito dos polos que estão próximos a ele. III. Zeros filtram variações bruscas do sinal de entrada e polos amplificam.
Está correto somente o que se apresenta em
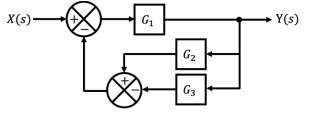
A função de transferência Y(s)/X(s) do sistema é igual a
Para esta configuração em Malha Fechada, sabe-se que quando o valor do ganho K varia positivamente de 0 a infinito, o sistema em Malha Fechada entra em INSTABIIDADE a partir de um certo ganho. O valor do ganho no limiar da INSTABILIDADE é
G(s) = Y(s)/E(s) = 42/s2+8s+12
Aplicando-se um degrau de tensão, de amplitude 5 volts, na entrada desse sistema, a amplitude do sinal de tensão, em volts, na saída desse sistema, quando atingir o seu regime permanente, vai tender para
O gráfico mostrado na Figura a seguir apresenta a resposta ao degrau de um sistema de 2ª ordem. Esse sistema é representado pela seguinte Função de Transferência entre entrada e saída, onde o parâmetro B é desconhecido:

Com base nos dados da Figura, os valores do parâmetro
B e os da Razão de Amortecimento do sistema são, respectivamente,