Questões de Concurso Sobre engenharia eletrônica
Foram encontradas 3.972 questões
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
Polícia Federal
Prova:
CESPE - 2013 - Polícia Federal - Perito Criminal Federal - Cargo 2 |
Q491389
Engenharia Eletrônica
A respeito de filtros digitais, julgue o próximo item.
A função de transferência de um filtro cuja equação das diferenças é y[n] = x[n] - x[n - 2] -y[n - 1] é H(z) = 1 - z-2 / 1 - z-1 .
A função de transferência de um filtro cuja equação das diferenças é y[n] = x[n] - x[n - 2] -y[n - 1] é H(z) = 1 - z-2 / 1 - z-1 .
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
Polícia Federal
Prova:
CESPE - 2013 - Polícia Federal - Perito Criminal Federal - Cargo 2 |
Q491367
Engenharia Eletrônica
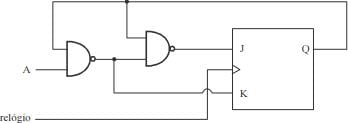
Considerando que, no circuito lógico mostrado na figura acima, o flip-flop seja do tipo JK mestre-escravo, julgue o item a seguir.
J = A . Q +

Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
Polícia Federal
Prova:
CESPE - 2013 - Polícia Federal - Perito Criminal Federal - Cargo 2 |
Q491365
Engenharia Eletrônica
Considerando que, no circuito lógico mostrado na figura acima, o flip-flop seja do tipo JK mestre-escravo, julgue o item a seguir.
Se A = 0, então o estado de Q será invertido após um ciclo completo de relógio.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
Polícia Federal
Prova:
CESPE - 2013 - Polícia Federal - Perito Criminal Federal - Cargo 2 |
Q491360
Engenharia Eletrônica
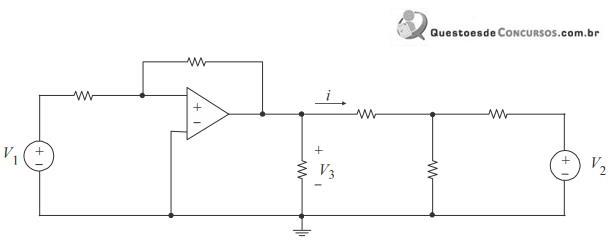
Considerando que, no circuito da figura acima, o amplificador operacional seja ideal e todos os resistores sejam de 1 Ω, julgue o item subsecutivo.
i = 2V3 - V2 .
3
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
Polícia Federal
Prova:
CESPE - 2013 - Polícia Federal - Perito Criminal Federal - Cargo 2 |
Q491358
Engenharia Eletrônica
Acerca do funcionamento de um transistor bipolar de junção NPN, julgue o item abaixo.
Se a tensão na base for maior que a tensão no emissor, e se a tensão no coletor for menor que a tensão na base, então o transistor operará no modo de corte.
Se a tensão na base for maior que a tensão no emissor, e se a tensão no coletor for menor que a tensão na base, então o transistor operará no modo de corte.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
MPU
Prova:
CESPE - 2013 - MPU - Analista - Engenharia Elétrica |
Q475270
Engenharia Eletrônica
A relação no domínio do tempo entre o sinal de entrada u(t) e de saída y(t) de uma planta industrial é representada pela equação diferencial de segunda ordem 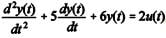 para t ≥ 0
para t ≥ 0
Tendo como base essas informações, julgue o próximo item.
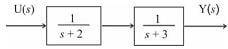
A figura abaixo representa corretamente uma das formas possíveis para a relação entre entrada e saída dessa planta na forma de diagrama em bloco, em que s é a variável da transformada de Laplace.
para t ≥ 0Tendo como base essas informações, julgue o próximo item.
A figura abaixo representa corretamente uma das formas possíveis para a relação entre entrada e saída dessa planta na forma de diagrama em bloco, em que s é a variável da transformada de Laplace.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
MPU
Prova:
CESPE - 2013 - MPU - Analista - Engenharia Elétrica |
Q475269
Engenharia Eletrônica
A relação no domínio do tempo entre o sinal de entrada u(t) e de saída y(t) de uma planta industrial é representada pela equação diferencial de segunda ordem para t ≥ 0
Tendo como base essas informações, julgue o próximo item.
Caso a entrada seja dada por u(t) = 5 sen(t), para t ≥ 0, então a amplitude da saída em regime permanente será igual a 2.
para t ≥ 0Tendo como base essas informações, julgue o próximo item.
Caso a entrada seja dada por u(t) = 5 sen(t), para t ≥ 0, então a amplitude da saída em regime permanente será igual a 2.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
MPU
Prova:
CESPE - 2013 - MPU - Analista - Engenharia Elétrica |
Q475268
Engenharia Eletrônica
A relação no domínio do tempo entre o sinal de entrada u(t) e de saída y(t) de uma planta industrial é representada pela equação diferencial de segunda ordem para t ≥ 0
Tendo como base essas informações, julgue o próximo item.
Considerando o vetor de estados x(t) = [x1(t) x2(t)] T , uma das possíveis maneiras de representar a planta industrial na forma de variáveis de estados é apresentada abaixo.

para t ≥ 0Tendo como base essas informações, julgue o próximo item.
Considerando o vetor de estados x(t) = [x1(t) x2(t)] T , uma das possíveis maneiras de representar a planta industrial na forma de variáveis de estados é apresentada abaixo.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
MPU
Prova:
CESPE - 2013 - MPU - Analista - Engenharia Elétrica |
Q475267
Engenharia Eletrônica
Considere um sistema dinâmico contínuo no tempo cuja função de transferência é dada por  Visando uma aplicação que requer dados na forma discreta, será necessário converter essa função de transferência para o domínio do tempo discreto utilizando a transformada Z. Para esta conversão, é utilizada a transformação bilinear com frequência de amostragem igual a 5 Hz. Com base nessas informações, julgue o item que se segue.
Visando uma aplicação que requer dados na forma discreta, será necessário converter essa função de transferência para o domínio do tempo discreto utilizando a transformada Z. Para esta conversão, é utilizada a transformação bilinear com frequência de amostragem igual a 5 Hz. Com base nessas informações, julgue o item que se segue.
A resposta ao degrau unitário do sistema contínuo em regime estacionário é igual a 2.
Visando uma aplicação que requer dados na forma discreta, será necessário converter essa função de transferência para o domínio do tempo discreto utilizando a transformada Z. Para esta conversão, é utilizada a transformação bilinear com frequência de amostragem igual a 5 Hz. Com base nessas informações, julgue o item que se segue.A resposta ao degrau unitário do sistema contínuo em regime estacionário é igual a 2.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
MPU
Prova:
CESPE - 2013 - MPU - Analista - Engenharia Elétrica |
Q475266
Engenharia Eletrônica
Considere um sistema dinâmico contínuo no tempo cuja função de transferência é dada por Visando uma aplicação que requer dados na forma discreta, será necessário converter essa função de transferência para o domínio do tempo discreto utilizando a transformada Z. Para esta conversão, é utilizada a transformação bilinear com frequência de amostragem igual a 5 Hz. Com base nessas informações, julgue o item que se segue.
A função de transferência equivalente no domínio da transformada Z é H(z) =1 - z -1
Visando uma aplicação que requer dados na forma discreta, será necessário converter essa função de transferência para o domínio do tempo discreto utilizando a transformada Z. Para esta conversão, é utilizada a transformação bilinear com frequência de amostragem igual a 5 Hz. Com base nessas informações, julgue o item que se segue.A função de transferência equivalente no domínio da transformada Z é H(z) =1 - z -1
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
MPU
Prova:
CESPE - 2013 - MPU - Analista - Engenharia Elétrica |
Q475265
Engenharia Eletrônica
Considere um sistema dinâmico contínuo no tempo cuja função de transferência é dada por Visando uma aplicação que requer dados na forma discreta, será necessário converter essa função de transferência para o domínio do tempo discreto utilizando a transformada Z. Para esta conversão, é utilizada a transformação bilinear com frequência de amostragem igual a 5 Hz. Com base nessas informações, julgue o item que se segue.
O sistema contínuo não apresenta zeros e polos no infinito.
Visando uma aplicação que requer dados na forma discreta, será necessário converter essa função de transferência para o domínio do tempo discreto utilizando a transformada Z. Para esta conversão, é utilizada a transformação bilinear com frequência de amostragem igual a 5 Hz. Com base nessas informações, julgue o item que se segue.O sistema contínuo não apresenta zeros e polos no infinito.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
MPU
Prova:
CESPE - 2013 - MPU - Analista - Engenharia Elétrica |
Q475264
Engenharia Eletrônica
Considere um sistema dinâmico contínuo no tempo cuja função de transferência é dada por Visando uma aplicação que requer dados na forma discreta, será necessário converter essa função de transferência para o domínio do tempo discreto utilizando a transformada Z. Para esta conversão, é utilizada a transformação bilinear com frequência de amostragem igual a 5 Hz. Com base nessas informações, julgue o item que se segue.
A resposta ao impulso do sistema contínuo é dada por h(t) = 2 - 20e -10t, para t ≥ 0 .
Visando uma aplicação que requer dados na forma discreta, será necessário converter essa função de transferência para o domínio do tempo discreto utilizando a transformada Z. Para esta conversão, é utilizada a transformação bilinear com frequência de amostragem igual a 5 Hz. Com base nessas informações, julgue o item que se segue.A resposta ao impulso do sistema contínuo é dada por h(t) = 2 - 20e -10t, para t ≥ 0 .
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
MPU
Prova:
CESPE - 2013 - MPU - Analista - Engenharia Elétrica |
Q475229
Engenharia Eletrônica
Considerando as tecnologias e os processos envolvidos na construção e na utilização de dispositivos e circuitos eletrônicos, julgue o item a seguir.
As entradas PRESET e CLEAR de um flip-flop JK não podem assumir o valor zero simultaneamente. Já o flip-flop T é um JK que possui as entradas J e K curto-circuitadas.
As entradas PRESET e CLEAR de um flip-flop JK não podem assumir o valor zero simultaneamente. Já o flip-flop T é um JK que possui as entradas J e K curto-circuitadas.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
MPU
Prova:
CESPE - 2013 - MPU - Analista - Engenharia Elétrica |
Q475228
Engenharia Eletrônica
Considerando as tecnologias e os processos envolvidos na construção e na utilização de dispositivos e circuitos eletrônicos, julgue o item a seguir.
A resolução de um conversor D/A é a maior alteração que pode ocorrer na saída analógica como resultado de uma mudança na entrada digital, ou seja, a alteração corresponde à saída de fundo de escala.
A resolução de um conversor D/A é a maior alteração que pode ocorrer na saída analógica como resultado de uma mudança na entrada digital, ou seja, a alteração corresponde à saída de fundo de escala.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
MPU
Prova:
CESPE - 2013 - MPU - Analista - Engenharia Elétrica |
Q475227
Engenharia Eletrônica
Considerando as tecnologias e os processos envolvidos na construção e na utilização de dispositivos e circuitos eletrônicos, julgue o item a seguir.
O produto velocidade-potência de uma porta lógica, obtido pela multiplicação do atraso de propagação pela potência dissipada, é utilizado para comparar o desempenho entre famílias de circuitos integrados.
O produto velocidade-potência de uma porta lógica, obtido pela multiplicação do atraso de propagação pela potência dissipada, é utilizado para comparar o desempenho entre famílias de circuitos integrados.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
SEGESP-AL
Prova:
CESPE - 2013 - SEGESP-AL - Perito Criminal - Engenharia |
Q458486
Engenharia Eletrônica
Julgue os itens seguintes, relativos às tecnologias e às plataformas de telecomunicações.
Em sistemas celulares, o nível de interferência cocanal é a razão entre a potência do canal transmitido pela soma das potências dos canais das células vizinhas que utilizam frequência diversa da frequência do canal transmitido.
Em sistemas celulares, o nível de interferência cocanal é a razão entre a potência do canal transmitido pela soma das potências dos canais das células vizinhas que utilizam frequência diversa da frequência do canal transmitido.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
SEGESP-AL
Prova:
CESPE - 2013 - SEGESP-AL - Perito Criminal - Engenharia |
Q458485
Engenharia Eletrônica
Julgue os itens seguintes, relativos às tecnologias e às plataformas de telecomunicações.
A comutação espacial, utilizada por meio do posicionamento de chaves nas centrais eletromecânicas, não tem aplicação nas centrais digitais baseadas na tecnologia da comutação temporal.
A comutação espacial, utilizada por meio do posicionamento de chaves nas centrais eletromecânicas, não tem aplicação nas centrais digitais baseadas na tecnologia da comutação temporal.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
SEGESP-AL
Prova:
CESPE - 2013 - SEGESP-AL - Perito Criminal - Engenharia |
Q458484
Engenharia Eletrônica
Julgue os itens seguintes, relativos às tecnologias e às plataformas de telecomunicações.
A modulação PCM é obtida, a partir de sinais PAM, pela codificação de cada amostra quantizada em uma palavra digital.
A modulação PCM é obtida, a partir de sinais PAM, pela codificação de cada amostra quantizada em uma palavra digital.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
SEGESP-AL
Prova:
CESPE - 2013 - SEGESP-AL - Perito Criminal - Engenharia |
Q458483
Engenharia Eletrônica
No que se refere às eletrônicas analógica, digital e de potência, julgue os itens de subsequentes.
O flip-flop JK é um flip-flop SR aprimorado, sem o uso de realimentação
O flip-flop JK é um flip-flop SR aprimorado, sem o uso de realimentação
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
SEGESP-AL
Prova:
CESPE - 2013 - SEGESP-AL - Perito Criminal - Engenharia |
Q458482
Engenharia Eletrônica
No que se refere às eletrônicas analógica, digital e de potência, julgue os itens de subsequentes.
A figura abaixo representa um conversor série-paralelo construído com um registrador de deslocamento.
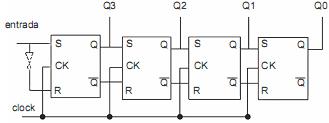
A figura abaixo representa um conversor série-paralelo construído com um registrador de deslocamento.