Questões de Concurso Sobre engenharia eletrônica
Foram encontradas 3.922 questões
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Instrumentação Eletroeletrônica |
Q2223769
Engenharia Eletrônica
NÃO é exemplo de transdutor de medida:
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Instrumentação Eletroeletrônica |
Q2223768
Engenharia Eletrônica
Os ruídos intrínsecos ou inerentes estão presentes na maioria dos componentes
eletrônicos, passivos e ativos, gerados por elementos de circuitos, tais como: resistores, diodos,
transistores bipolares, transistores de efeito de campo. Em relação aos tipos de ruídos intrínseco ou
inerente, analise as assertivas abaixo, assinalando V, se verdadeiras, ou F, se falsas.
( ) O ruído térmico é gerado pela agitação térmica dos elétrons em um condutor.
( ) O ruído burst é causado pelas oscilações aleatórias do movimento dos portadores de carga em um condutor.
( ) O ruído avalanche aparece quando a junção pn é operada no modo de condução reversa.
( ) O ruído shot está relacionado com as imperfeições nos materiais semicondutores e nas implantações de íons pesados.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é:
( ) O ruído térmico é gerado pela agitação térmica dos elétrons em um condutor.
( ) O ruído burst é causado pelas oscilações aleatórias do movimento dos portadores de carga em um condutor.
( ) O ruído avalanche aparece quando a junção pn é operada no modo de condução reversa.
( ) O ruído shot está relacionado com as imperfeições nos materiais semicondutores e nas implantações de íons pesados.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é:
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Instrumentação Eletroeletrônica |
Q2223767
Engenharia Eletrônica
O arredondamento é o processo mediante o qual se eliminam algarismos menos
significativos em um valor medido. A equação a seguir apresenta a soma de três potências:
Pt = 20 W + 5,487 W + 8,75483 W
O valor do Pt, considerando o arredondamento para três casas decimais, é:
Pt = 20 W + 5,487 W + 8,75483 W
O valor do Pt, considerando o arredondamento para três casas decimais, é:
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Instrumentação Eletroeletrônica |
Q2223766
Engenharia Eletrônica
Analise as seguintes asserções e a relação proposta entre elas:
I. Erros Sistemáticos são erros inerentes ao sistema de medição que compreende o meio ambiente, os instrumentos de medição e o observador. Em geral têm comportamento conhecido, o que permite que sejam corrigidos adotando-se procedimentos adequados de medição ou através de correções analíticas.
PORQUE
II. Sempre que as condições ambientais permanecem “constantes”, a magnitude dos erros sistemáticos também se mantém constante. As condições que ocasionam os erros sistemáticos se devem às leis físicas, que podem ser representadas matematicamente (modeladas).
A respeito dessas asserções, assinale a alternativa correta.
I. Erros Sistemáticos são erros inerentes ao sistema de medição que compreende o meio ambiente, os instrumentos de medição e o observador. Em geral têm comportamento conhecido, o que permite que sejam corrigidos adotando-se procedimentos adequados de medição ou através de correções analíticas.
PORQUE
II. Sempre que as condições ambientais permanecem “constantes”, a magnitude dos erros sistemáticos também se mantém constante. As condições que ocasionam os erros sistemáticos se devem às leis físicas, que podem ser representadas matematicamente (modeladas).
A respeito dessas asserções, assinale a alternativa correta.
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Instrumentação Eletroeletrônica |
Q2223765
Engenharia Eletrônica
Considere as seguintes formas de onda:
i = – 5 cos(ωt – 50°) v = 10 sen(ωt – 140°)
A relação de fase entre as formas de onda senoidais i e v é:
i = – 5 cos(ωt – 50°) v = 10 sen(ωt – 140°)
A relação de fase entre as formas de onda senoidais i e v é:
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Instrumentação Eletroeletrônica |
Q2223764
Engenharia Eletrônica
A permissividade é a razão entre ____________________ no dielétrico. Trata-se de
uma medida da facilidade com que o dielétrico “permite” o estabelecimento de _____________ no
seu interior.
Assinale a alternativa que preenche, correta e respectivamente, as lacunas do trecho acima.
Assinale a alternativa que preenche, correta e respectivamente, as lacunas do trecho acima.
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Instrumentação Eletroeletrônica |
Q2223763
Engenharia Eletrônica
Relacione a Coluna 1 à Coluna 2, associando os teoremas da análise de circuitos às
suas respectivas afirmações.
Coluna 1 1. Teorema da Superposição. 2. Teorema de Thévenin. 3. Teorema de Norton. 4. Teorema da Substituição. 5. Teorema da Reciprocidade.
Coluna 2 ( ) Qualquer circuito de corrente contínua linear bilateral de dois terminais pode ser substituído por um circuito equivalente constituído por uma fonte de tensão e um resistor em série.
( ) A corrente I em qualquer ramo de um circuito, com uma única fonte de tensão E localizada em outro ramo qualquer do mesmo circuito, é igual à corrente no ramo em que se encontrava a fonte se ela for transferida para o ramo no qual a corrente I foi originalmente medida.
( ) Se a corrente que atravessa um ramo qualquer de um circuito bilateral de corrente contínua e a tensão entre os terminais do mesmo ramo são conhecidas, esse ramo pode ser substituído por qualquer combinação de componentes que mantenha inalteradas a tensão e a corrente associadas ao ramo escolhido.
( ) A corrente através de um elemento, ou a tensão entre seus terminais, em um circuito linear bilateral, é igual à soma algébrica das correntes ou das tensões produzidas independentemente por cada uma das fontes.
( ) Qualquer circuito de corrente contínua linear bilateral de dois terminais pode ser substituído por um circuito equivalente formado por uma fonte de corrente e um resistor em paralelo.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é:
Coluna 1 1. Teorema da Superposição. 2. Teorema de Thévenin. 3. Teorema de Norton. 4. Teorema da Substituição. 5. Teorema da Reciprocidade.
Coluna 2 ( ) Qualquer circuito de corrente contínua linear bilateral de dois terminais pode ser substituído por um circuito equivalente constituído por uma fonte de tensão e um resistor em série.
( ) A corrente I em qualquer ramo de um circuito, com uma única fonte de tensão E localizada em outro ramo qualquer do mesmo circuito, é igual à corrente no ramo em que se encontrava a fonte se ela for transferida para o ramo no qual a corrente I foi originalmente medida.
( ) Se a corrente que atravessa um ramo qualquer de um circuito bilateral de corrente contínua e a tensão entre os terminais do mesmo ramo são conhecidas, esse ramo pode ser substituído por qualquer combinação de componentes que mantenha inalteradas a tensão e a corrente associadas ao ramo escolhido.
( ) A corrente através de um elemento, ou a tensão entre seus terminais, em um circuito linear bilateral, é igual à soma algébrica das correntes ou das tensões produzidas independentemente por cada uma das fontes.
( ) Qualquer circuito de corrente contínua linear bilateral de dois terminais pode ser substituído por um circuito equivalente formado por uma fonte de corrente e um resistor em paralelo.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é:
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Instrumentação Eletroeletrônica |
Q2223762
Engenharia Eletrônica
Um circuito ∆ é apresentado na Figura 1 a seguir: 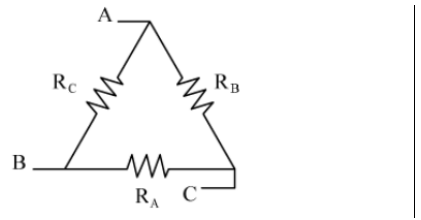 Dados: RA = 40 Ω, RB = 15 Ω, RC = 20 Ω Figura 1
Dados: RA = 40 Ω, RB = 15 Ω, RC = 20 Ω Figura 1
O circuito equivalente em Y é apresentado na Figura 2 a seguir: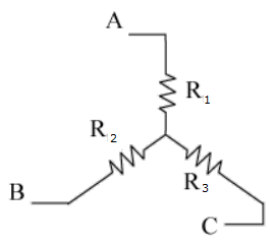
Figura 2
Assinale a alternativa que apresenta os valores para R1, R2 e R3 no circuito equivalente em Y.
Dados: RA = 40 Ω, RB = 15 Ω, RC = 20 Ω Figura 1 O circuito equivalente em Y é apresentado na Figura 2 a seguir:
Figura 2
Assinale a alternativa que apresenta os valores para R1, R2 e R3 no circuito equivalente em Y.
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Instrumentação Eletroeletrônica |
Q2223761
Engenharia Eletrônica
Sobre Circuitos em Paralelo, analise as assertivas abaixo e assinale a alternativa
correta.
I. A resistência total referente a dois resistores em paralelo é a soma das duas resistências dividida pelo seu produto.
II. Elementos em paralelo podem ser intercambiados sem alterar a resistência total ou a corrente total.
III. No caso de resistores em paralelo, o valor da resistência total sempre diminui quando acrescentamos no circuito um outro resistor em paralelo.
IV. Para circuitos em paralelo com apenas uma fonte, a corrente fornecida pela fonte principal é equivalente à corrente do primeiro ramo do circuito.
I. A resistência total referente a dois resistores em paralelo é a soma das duas resistências dividida pelo seu produto.
II. Elementos em paralelo podem ser intercambiados sem alterar a resistência total ou a corrente total.
III. No caso de resistores em paralelo, o valor da resistência total sempre diminui quando acrescentamos no circuito um outro resistor em paralelo.
IV. Para circuitos em paralelo com apenas uma fonte, a corrente fornecida pela fonte principal é equivalente à corrente do primeiro ramo do circuito.
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Instrumentação Eletroeletrônica |
Q2223760
Engenharia Eletrônica
Diariamente, um aparelho de televisão de 205 W fica ligado por 15 horas. Qual o
consumo mensal desse aparelho?
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Instrumentação Eletroeletrônica |
Q2223759
Engenharia Eletrônica
Um resistor fixo de carbono apresenta o seguinte valor: 39 Ω ± 5%. Analisando o
seu código de cores, assinale a alternativa que apresenta a sequência de cores que representa esse
valor.
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Instrumentação Eletroeletrônica |
Q2223758
Engenharia Eletrônica
A temperatura de -234,5°C é chamada temperatura absoluta inferida do cobre. Se a
resistência de um fio de cobre à temperatura de congelamento da água (0°C) é 35 Ω, qual a sua
resistência a -25°C?
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Instrumentação Eletroeletrônica |
Q2223757
Engenharia Eletrônica
Um instrumento de medição pode ser um sistema mecânico, eletromecânico ou
eletrônico que integra um ou mais sensores e/ou um ou mais transdutores a dispositivos com funções
específicas de processamento de determinada variável. Nesse sentido, relacione a Coluna 1 à
Coluna 2, associando os instrumentos de medição às suas respectivas funções.
Coluna 1 1. Voltímetro. 2. Wattímetro. 3. Amperímetro. 4. Ohmímetro.
5. Osciloscópio.
Coluna 2 ( ) Medir corrente elétrica.
( ) Além de medir grandezas elétricas, ainda mostra a forma do sinal da grandeza.
( ) Medir tensão elétrica.
( ) Medir potência elétrica.
( ) Medir a resistência de um determinado elemento.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é:
Coluna 1 1. Voltímetro. 2. Wattímetro. 3. Amperímetro. 4. Ohmímetro.
5. Osciloscópio.
Coluna 2 ( ) Medir corrente elétrica.
( ) Além de medir grandezas elétricas, ainda mostra a forma do sinal da grandeza.
( ) Medir tensão elétrica.
( ) Medir potência elétrica.
( ) Medir a resistência de um determinado elemento.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é:
Ano: 2023
Banca:
FURB
Órgão:
Prefeitura de Tijucas - SC
Prova:
FURB - 2023 - Prefeitura de Tijucas - SC - Engenheiro Químico |
Q2191146
Engenharia Eletrônica
A automação industrial é uma das áreas de atuação de
um engenheiro químico. Em relação aos sistemas
supervisórios, é correto afirmar que:
Q2182998
Engenharia Eletrônica
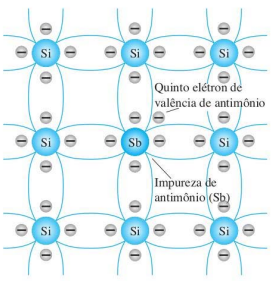
Sobre a física dos semicondutores e sobre a figura a seguir, é correto afirmar:
Q2182997
Engenharia Eletrônica
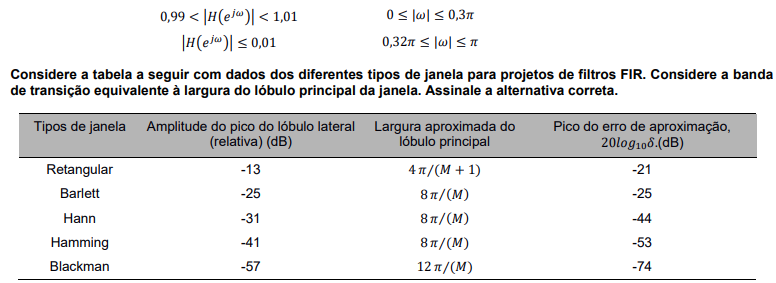
Desejamos projetar um filtro FIR que respeite a seguinte máscara de filtragem:
Q2182995
Engenharia Eletrônica
Considere um sistema embarcado baseado em Arduíno e programação via IDE do Arduíno. A função tone faz parte do
elenco de bibliotecas para Arduíno e gera, em uma saída em PWM de 8 bits, um cosseno cuja frequência desejada é o
primeiro parâmetro de entrada, durante um tempo em ms definido pela segunda entrada. A função map também faz do
elenco de bibliotecas para Arduíno e segue no código, por conveniência. Para o circuito e código descrito a seguir,
assinale a alternativa correta.
Q2182994
Engenharia Eletrônica
A respeito dos sistemas com microprocessadores, assinale a alternativa correta.
Q2182993
Engenharia Eletrônica
Considere as seguintes informações sobre o sensor de temperatura termistor NTC:
O termistor NTC segue a relação de resistência por temperatura da figura a seguir:
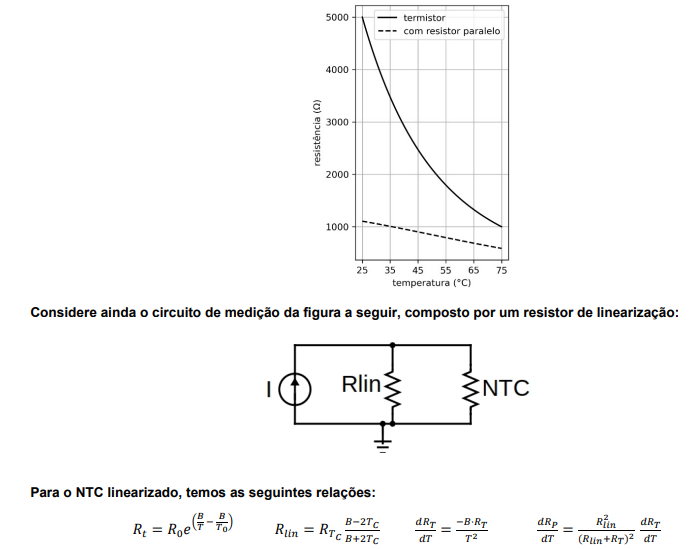
Considerando as informações apresentadas, assinale a alternativa correta.
Q2182992
Engenharia Eletrônica
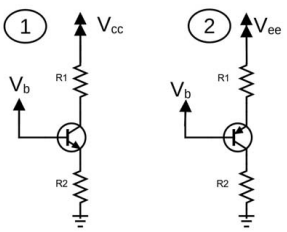
O texto a seguir é referência para a questão. Considere o seguinte modelo para o BJT:
Para NPN: - junção base-emissor (JBE): em bloqueio se VBE ≤ 0,7 V; em condução, assumir VBE = 0,7 V. - junção base-coletor (JBC): em bloqueio se VBC ≤ 0,5 V; em condução, assumir VBC = 0,5 V. - para BJT em modo ativo (ou seja, JBE em condução e JBC em bloqueio), assumir IC = βIB. - para BJT em saturação (ou seja, ambas JBE e JBC em condução e 0 ≤ IC/IB ≤ β), assumir VCE = 0,2 V. - para BJT em corte (ou seja, ambas JBE e JBC em bloqueio), assumir IB = 0 e IC = 0.
Para PNP: - junção emissor-base (JEB): em bloqueio se VEB ≤ 0,7 V; em condução, assumir VEB = 0,7 V. - junção coletor-base (JCB): em bloqueio se VCB ≤ 0,5 V; em condução, assumir VCB = 0,5 V. - para BJT em modo ativo (ou seja, JEB em condução e JCB em bloqueio), assumir IC = βIB. - para BJT em saturação (ou seja, ambas JEB e JCB em condução e 0 ≤ IC/IB ≤ β), assumir VEC = 0,2 V. - para BJT em corte (ou seja, ambas JEB e JCB em bloqueio), assumir IB = 0 e IC = 0.
Considerando os circuitos (1) e (2) a seguir, e um b = 70, assinale a alternativa correta.
Para NPN: - junção base-emissor (JBE): em bloqueio se VBE ≤ 0,7 V; em condução, assumir VBE = 0,7 V. - junção base-coletor (JBC): em bloqueio se VBC ≤ 0,5 V; em condução, assumir VBC = 0,5 V. - para BJT em modo ativo (ou seja, JBE em condução e JBC em bloqueio), assumir IC = βIB. - para BJT em saturação (ou seja, ambas JBE e JBC em condução e 0 ≤ IC/IB ≤ β), assumir VCE = 0,2 V. - para BJT em corte (ou seja, ambas JBE e JBC em bloqueio), assumir IB = 0 e IC = 0.
Para PNP: - junção emissor-base (JEB): em bloqueio se VEB ≤ 0,7 V; em condução, assumir VEB = 0,7 V. - junção coletor-base (JCB): em bloqueio se VCB ≤ 0,5 V; em condução, assumir VCB = 0,5 V. - para BJT em modo ativo (ou seja, JEB em condução e JCB em bloqueio), assumir IC = βIB. - para BJT em saturação (ou seja, ambas JEB e JCB em condução e 0 ≤ IC/IB ≤ β), assumir VEC = 0,2 V. - para BJT em corte (ou seja, ambas JEB e JCB em bloqueio), assumir IB = 0 e IC = 0.
Considerando os circuitos (1) e (2) a seguir, e um b = 70, assinale a alternativa correta.