Questões de Concurso
Sobre eletrônica na engenharia mecatrônica em engenharia mecatrônica
Foram encontradas 61 questões
Q1393166
Engenharia Mecatrônica
Um sistema pode ser definido como sendo um conjunto de
elementos que são interligados de alguma maneira para
compor um todo e, assim, realizar a funcionalidade
específica. No sistema digital, com relação à
representação corportamental, é correto afirmar que
Q1393165
Engenharia Mecatrônica
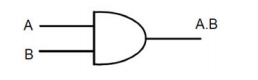
Uma função booleana pode ser representada de forma
gráfica, em que cada operador está associado a um
símbolo específico, permitindo o imediato reconhecimento
visual. Esses símbolos são conhecidos como portas
lógicas. É correto afirmar que a porta lógica, representada
na figura abaixo, refere-se à porta
Q1393162
Engenharia Mecatrônica
Observe a figura abaixo.
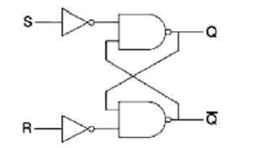
Dos tipos de flip-flops, o circuito representado na figura representa o tipo
Q1393157
Engenharia Mecatrônica
Sobre o princípio de funcionamento do tipo de controle
PWM, representado pela figura abaixo, denominado
Locked anti-phase PWM, marque V para verdadeiro ou F
para falso e, em seguida, assinale a alternativa que
apresenta a sequência correta.
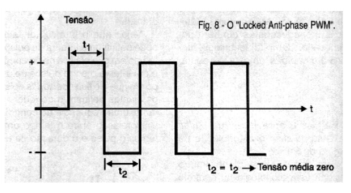
( ) Se os pulsos aplicados à carga variarem entre 0V e um valor máximo de tensão +V, por exemplo, mas entre uma tensão negativa e uma tensão positiva (-V a +V), o ciclo ativo não determina o sentido de circulação da corrente pela carga.
( ) Se o ciclo ativo for de 50%, como na figura, a tensão média na carga e portanto a potência serão 0 (zero).
( ) Variando o ciclo ativo para mais e para menos de 50%, tem-se uma predominância dos pulsos positivos ou negativos de modo que a corrente média tende a circular num sentido ou noutro, conforme a figura.
( ) Se os pulsos aplicados à carga variarem entre 0V e um valor máximo de tensão +V, por exemplo, mas entre uma tensão negativa e uma tensão positiva (-V a +V), o ciclo ativo não determina o sentido de circulação da corrente pela carga.
( ) Se o ciclo ativo for de 50%, como na figura, a tensão média na carga e portanto a potência serão 0 (zero).
( ) Variando o ciclo ativo para mais e para menos de 50%, tem-se uma predominância dos pulsos positivos ou negativos de modo que a corrente média tende a circular num sentido ou noutro, conforme a figura.
Q1393155
Engenharia Mecatrônica
Dos tipos de inversores de frequência, sobre o inversor
escalar, é correto afirmar que
Q1393149
Engenharia Mecatrônica
Sobre a servoválvula, marque V para verdadeiro ou F para
falso e, em seguida, assinale a alternativa que apresenta a
sequência correta.
( ) É aplicada como amplificador comandado eletricamente (na maioria dos casos, em circuitos de malha fechada), isto é, um sinal elétrico de entrada não somente é transformado em correspondente vazão de óleo, mas os desvios da velocidade determinada ou a posição são medidos eletricamente e conduzidos para a devida correção.
( ) O componente básico desse tipo de válvula é o motor de torque, que tem como partes principais o imã permanente, duas bobinas e uma armação.
( ) Com sinal elétrico de entrada zero, no motor de torque, há corrente elétrica nas bobinas e a armação passa para posição negativa.
( ) É aplicada como amplificador comandado eletricamente (na maioria dos casos, em circuitos de malha fechada), isto é, um sinal elétrico de entrada não somente é transformado em correspondente vazão de óleo, mas os desvios da velocidade determinada ou a posição são medidos eletricamente e conduzidos para a devida correção.
( ) O componente básico desse tipo de válvula é o motor de torque, que tem como partes principais o imã permanente, duas bobinas e uma armação.
( ) Com sinal elétrico de entrada zero, no motor de torque, há corrente elétrica nas bobinas e a armação passa para posição negativa.
Q1198538
Engenharia Mecatrônica
Sobre controladores lógicos programáveis, considere as seguintes afirmativas:
1. EEPROM são memórias internas ao equipamento, programadas pelo fabricante, e só podem ser apagadas com ultravioleta. 2. Tempo de varredura é o tempo que o CLP leva para cumprir um ciclo completo, sendo também denominado scantime. 3. Linguagens Ladder, diagrama de blocos e listas de instruções são tipos de linguagem de programação para CLPs.
Assinale a alternativa correta.
1. EEPROM são memórias internas ao equipamento, programadas pelo fabricante, e só podem ser apagadas com ultravioleta. 2. Tempo de varredura é o tempo que o CLP leva para cumprir um ciclo completo, sendo também denominado scantime. 3. Linguagens Ladder, diagrama de blocos e listas de instruções são tipos de linguagem de programação para CLPs.
Assinale a alternativa correta.
Ano: 2013
Banca:
VUNESP
Órgão:
DCTA
Prova:
VUNESP - 2013 - CTA - Tecnologista Júnior - Mecatrônica |
Q2902589
Engenharia Mecatrônica
Internamente em um processador, existem diversos componentes conectados. Um conjunto de fios paralelos e que transmitem endereços, dados e sinais de controle é conhecido como
Ano: 2013
Banca:
VUNESP
Órgão:
DCTA
Prova:
VUNESP - 2013 - CTA - Tecnologista Júnior - Mecatrônica |
Q2902581
Engenharia Mecatrônica
Os tiristores possuem uma estrutura que envolve camadas de materiais semicondutores em uma sequência, a saber:
Ano: 2013
Banca:
VUNESP
Órgão:
DCTA
Prova:
VUNESP - 2013 - CTA - Tecnologista Júnior - Mecatrônica |
Q2902560
Engenharia Mecatrônica
Nos sistemas de controle, o controlador ____________ é um compensador de atraso, pois possui um polo em s=0. O controlador ____________ é uma versão simplificada de um compensador de avanço e esse controlador envolve um ____________, mas nenhum ____________ .
Assinale a alternativa que completa, correta e respectivamente, as lacunas do texto.
Q134646
Engenharia Mecatrônica
Texto associado
Determinado circuito eletrônico tem função de transferência G(s)
dada pela expressão a seguir.

Considerando essa expressão e a resposta em frequência do
circuito, julgue os próximos itens.
dada pela expressão a seguir.
Considerando essa expressão e a resposta em frequência do
circuito, julgue os próximos itens.
O ganho desse circuito para frequências muito altas é maior que o ganho para frequências muito baixas.
Q134643
Engenharia Mecatrônica
Texto associado
Determinado circuito eletrônico tem função de transferência G(s)
dada pela expressão a seguir.
Considerando essa expressão e a resposta em frequência do
circuito, julgue os próximos itens.
dada pela expressão a seguir.
Considerando essa expressão e a resposta em frequência do
circuito, julgue os próximos itens.
O circuito em questão apresenta resposta em fase com ângulos entre 0 e − !90º.
Q134640
Engenharia Mecatrônica
Texto associado
Determinado circuito eletrônico tem função de transferência G(s)
dada pela expressão a seguir.
Considerando essa expressão e a resposta em frequência do
circuito, julgue os próximos itens.
dada pela expressão a seguir.
Considerando essa expressão e a resposta em frequência do
circuito, julgue os próximos itens.
Em termos de resposta em frequência, o circuito mencionado apresenta fase que tende a zero apenas para frequências muito baixas, próximas do valor zero.
Q134637
Engenharia Mecatrônica
Texto associado
Determinado circuito eletrônico tem função de transferência G(s)
dada pela expressão a seguir.
Considerando essa expressão e a resposta em frequência do
circuito, julgue os próximos itens.
dada pela expressão a seguir.
Considerando essa expressão e a resposta em frequência do
circuito, julgue os próximos itens.
O referido circuito possui ganho estático (DC ou CC) com valor igual a 50 unidades.
Q134635
Engenharia Mecatrônica
Texto associado
Determinado circuito eletrônico tem função de transferência G(s)
dada pela expressão a seguir.
Considerando essa expressão e a resposta em frequência do
circuito, julgue os próximos itens.
dada pela expressão a seguir.
Considerando essa expressão e a resposta em frequência do
circuito, julgue os próximos itens.
A partir da função de transferência apresentada, é correto inferir que o circuito em questão corresponde a um controlador PID.
Q134632
Engenharia Mecatrônica
Texto associado

Considerando o circuito na figura acima, no qual o transistor
bipolar de junção tem como função excitar o motor de corrente
contínua com imã permanente, julgue os itens subsequentes.
Considerando o circuito na figura acima, no qual o transistor
bipolar de junção tem como função excitar o motor de corrente
contínua com imã permanente, julgue os itens subsequentes.
Se a corrente nominal do motor, quando excitado pela fonte de 12 V, for de 1 A, então, na situação de chave aberta, e caso o transistor possua parâmetro  ou
ou  com valor 20, para que a corrente de coletor seja de aproximadamente 1 A, a resistência R deve ter valor muito maior que 100 Ω.
com valor 20, para que a corrente de coletor seja de aproximadamente 1 A, a resistência R deve ter valor muito maior que 100 Ω.
ou com valor 20, para que a corrente de coletor seja de aproximadamente 1 A, a resistência R deve ter valor muito maior que 100 Ω.
Q134630
Engenharia Mecatrônica
Texto associado
Considerando o circuito na figura acima, no qual o transistor
bipolar de junção tem como função excitar o motor de corrente
contínua com imã permanente, julgue os itens subsequentes.
Considerando o circuito na figura acima, no qual o transistor
bipolar de junção tem como função excitar o motor de corrente
contínua com imã permanente, julgue os itens subsequentes.
Quando saturado, o transistor apresenta tensão elétrica entre coletor e emissor em torno de 2 V.
Q134627
Engenharia Mecatrônica
Texto associado
Considerando o circuito na figura acima, no qual o transistor
bipolar de junção tem como função excitar o motor de corrente
contínua com imã permanente, julgue os itens subsequentes.
Considerando o circuito na figura acima, no qual o transistor
bipolar de junção tem como função excitar o motor de corrente
contínua com imã permanente, julgue os itens subsequentes.
O transistor bipolar no circuito em questão é do tipo PNP.
Q134624
Engenharia Mecatrônica
Texto associado
Considerando o circuito na figura acima, no qual o transistor
bipolar de junção tem como função excitar o motor de corrente
contínua com imã permanente, julgue os itens subsequentes.
Considerando o circuito na figura acima, no qual o transistor
bipolar de junção tem como função excitar o motor de corrente
contínua com imã permanente, julgue os itens subsequentes.
O diodo presente no circuito tem a função de dispositivo de proteção, já que impede a indução de alta tensão no terminal de coletor do transistor.
Q134622
Engenharia Mecatrônica
Texto associado
Um sistema dinâmico linear de ordem n possui a
representação, no espaço de estados, dada pelas equações a
seguir, em que u(t) é uma variável de entrada escalar, y(t) é uma
variável de saída escalar, x é o vetor de estado e A, B, C e D
caracterizam parametricamente o sistema.

A partir dessas informações, julgue os itens a seguir.
representação, no espaço de estados, dada pelas equações a
seguir, em que u(t) é uma variável de entrada escalar, y(t) é uma
variável de saída escalar, x é o vetor de estado e A, B, C e D
caracterizam parametricamente o sistema.
A partir dessas informações, julgue os itens a seguir.
Se houver desacoplamento entre todas as variáveis de estado, a matriz A, no sistema em apreço, poderá ser diagonal.