Questões de Concurso
Sobre eletrônica na engenharia mecatrônica em engenharia mecatrônica
Foram encontradas 61 questões
Internamente em um processador, existem diversos componentes conectados. Um conjunto de fios paralelos e que transmitem endereços, dados e sinais de controle é conhecido como
Os tiristores possuem uma estrutura que envolve camadas de materiais semicondutores em uma sequência, a saber:
Nos sistemas de controle, o controlador ____________ é um compensador de atraso, pois possui um polo em s=0. O controlador ____________ é uma versão simplificada de um compensador de avanço e esse controlador envolve um ____________, mas nenhum ____________ .
Assinale a alternativa que completa, correta e respectivamente, as lacunas do texto.A respeito da sintonia de controladores do tipo Proporcional-Integrativo-Derivativos (PID), em que a influência desejada pode ser obtida por meio do aumento e/ou diminuição dos ganhos individuais dos controladores, assinale a alternativa correta.
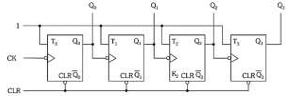
Qual é nome mais utilizado para o circuito elétrico da Figura XX?
Figura XX.
No que se refere à sintonia do controlador proporcional-integral-derivativo (PID), julgue o item a seguir.
derivativa do cálculo.
80 Um controlador PID calcula, inicialmente, o erro entre a
variável controlada e seu valor desejado.
No que se refere à sintonia do controlador proporcional-integral-derivativo (PID), julgue o item a seguir.
No algoritmo de um controlador PID digital, se houver erro
no cálculo, haverá desalinhamento apenas na etapa
derivativa do cálculo.
Na etapa proporcional do controle PID, o sinal de controle aplicado a cada instante à planta é proporcional à amplitude do valor do sinal de erro.
Julgue o item a seguir, relativos a controladores lógicos programáveis (CLP).
Devido a suas características, um CLP não é capaz de lidar
com variáveis analógicas, tampouco com tensão elétrica.
Analise a figura abaixo.
Assinale a alternativa que corresponda à montagem apresentada.

Com relação a técnicas de processamento digital de imagens em visão computacional aplicada à robótica, julgue o próximo item.
A transformada de Hough corresponde a uma técnica para
suavizar as bordas de determinada forma geométrica na
imagem.
Com relação a técnicas de processamento digital de imagens em visão computacional aplicada à robótica, julgue o próximo item.
Se uma imagem tiver sido corrompida por ruídos impulsivos
durante o processo de captura, é possível atenuar esses
ruídos com a utilização de um filtro de mediana.
Com relação a técnicas de processamento digital de imagens em visão computacional aplicada à robótica, julgue o próximo item.
Segmentação corresponde ao particionamento de regiões na
imagem que tenham significados específicos para
determinada aplicação.
Considere que você está usando um transdutor linear de pressão. Este dispositivo fornece uma corrente de saída que varia de 0 a 20 mA, correspondendo, respectivamente, a uma variação de pressão de 0 a 100 bar. Se o transdutor estiver fornecendo uma saída de 12 mA, qual será a pressão correspondente?
I. Inversores de frequência podem alterar o módulo e a frequência da tensão da rede trifásica de alimentação de um motor trifásico.
II. A tensão de entrada e de saída de um inversor de frequência são sempre ondas senoidais.
III. Inversores de frequência podem trabalhar com entradas monofásicas. No entanto, seu número de fases de saída será sempre igual ao número de fases de entrada.
IV. A aceleração e a frenagem de motores podem ser controladas com inversores de frequência.
Sobre as afirmações apresentadas podemos dizer que são corretas apenas: