Questões de Concurso
Sobre programação ladder e clp em engenharia mecatrônica
Foram encontradas 20 questões
Julgue o item a seguir, relativos a controladores lógicos programáveis (CLP).
Um CLP é indicado para lidar com sistemas de automação
caracterizados por eventos contínuos no tempo.
Julgue o item a seguir, relativos a controladores lógicos programáveis (CLP).
Os CLP têm capacidade de comunicação de dados via canais
seriais.
Assinale a alternativa que preencha corretamente a lacuna. Dentro da linguagem de programação e diagramas Ladder, a instrução ______ tem o seguinte comportamento:
Energizar uma saída com retenção.
Fonte: IFSP, 2023.
Fonte: IFSP, 2023.
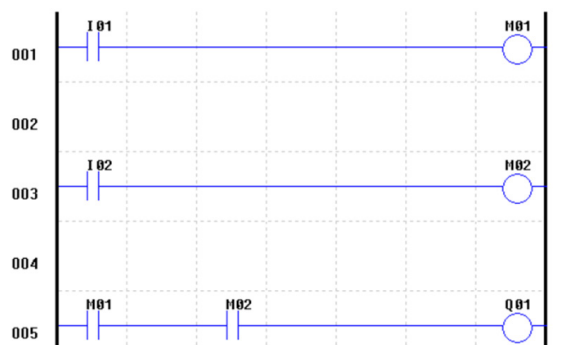
A programação de um controlador lógico programável (CLP) pode ser executada através diversas linguagens conforme os padrões definidos pela IEC 61131-3. Abaixo vemos um trecho de código específico da linguagem Ladder, na qual dois sensores A e B são entradas de sinal, utilizadas para acionar um Motor e um LED:
Figura 1: diagrama ladder.
Nesse contexto, considere as seguintes afirmações:
I. O estado do Motor e do LED são iguais independentemente do estado dos sensores A e B.
II. Quando o sensor B está acionado, o Motor estará ligado.
III. Quando o sensor A está acionado e o sensor B desacionado, o LED estará ligado.
Assinale a opção CORRETA:
A norma IEC 61131 define que para um CLP - Controlador Lógico Programável estar de acordo com os padrões por ela estabelecidos, deve possuir ao menos duas linguagens gráficas e duas linguagens de texto para sua programação. Assinale a alternativa que possui uma linguagem de programação não padronizada.
Em 1992, a International Electrotechnical Commission (IEC — Comissão Internacional de Eletrotécnica) publicou a primeira edição da norma IEC 61131, com o objetivo de estabelecer padrões para os controladores programáveis. Essa norma foi dividida em vários capítulos, possibilitando a definição de critérios para cada um dos tópicos relacionados aos CLPs. Assinale a alternativa CORRETA em relação aos conteúdos dessa norma.
eletrônico digital amplamente utilizado na automação de plantas
industriais.
eletrônico digital amplamente utilizado na automação de plantas
industriais.
eletrônico digital amplamente utilizado na automação de plantas
industriais.
eletrônico digital amplamente utilizado na automação de plantas
industriais.
problema particular a ser tratado. As juntas devem ser tais que
permitam que a extremidade do manipulador possa ser
configurada ao longo de um envelope de trabalho que contenha
o objeto a ser manipulado. A respeito dos manipuladores
robóticos, julgue os itens que se seguem.
interface amigável a fim de facilitar o trabalho da equipe
encarregada de sua operação. Essa interface, eficiente e
ergonômica, é designada, no mercado, como sistema supervisório
ou interface homem-máquina (IHM). Com relação a esse sistema
e à automação industrial, julgue os itens seguintes.
interface amigável a fim de facilitar o trabalho da equipe
encarregada de sua operação. Essa interface, eficiente e
ergonômica, é designada, no mercado, como sistema supervisório
ou interface homem-máquina (IHM). Com relação a esse sistema
e à automação industrial, julgue os itens seguintes.
interface amigável a fim de facilitar o trabalho da equipe
encarregada de sua operação. Essa interface, eficiente e
ergonômica, é designada, no mercado, como sistema supervisório
ou interface homem-máquina (IHM). Com relação a esse sistema
e à automação industrial, julgue os itens seguintes.
interface amigável a fim de facilitar o trabalho da equipe
encarregada de sua operação. Essa interface, eficiente e
ergonômica, é designada, no mercado, como sistema supervisório
ou interface homem-máquina (IHM). Com relação a esse sistema
e à automação industrial, julgue os itens seguintes.
interface amigável a fim de facilitar o trabalho da equipe
encarregada de sua operação. Essa interface, eficiente e
ergonômica, é designada, no mercado, como sistema supervisório
ou interface homem-máquina (IHM). Com relação a esse sistema
e à automação industrial, julgue os itens seguintes.