Questões de Concurso Sobre mecatrônica
Foram encontradas 80 questões
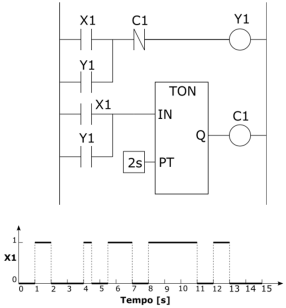
Desprezando-se o tempo de varredura do CLP, o tempo, em segundos, em que Y1 permanece em nível lógico 1 no intervalo de 0 a 15s é
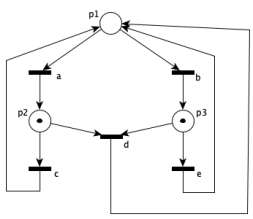
A transição que possui a propriedade de ser não viva é a transição
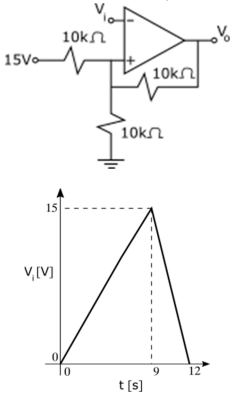
Considerando-se que de 0 a 12 segundos o sinal Vi apresenta a variação indicada na figura e que Vo = 15V em t = 0s, o tempo total, em segundos em que Vo permanece em 0V no intervalo de 0 a 12 segundos é

Sabendo-se que a viga suporta um esforço de compressão e tração máximas acima e abaixo da linha neutra (LN) respectivamente, na situação em que distâncias das bases inferior e superior com a LN forem no máximo iguais a 4 dm.
Assinale a opção que indica a distância da linha neutra da base inferior e a sua resposta aos esforços, respectivamente.
Desprezando-se a indutância da armadura e atritos viscosos norotor, pode-se obter um modelo de primeira ordem para omotor, na forma da função de transferência:
Ω(s)/ V(s) = A/
 + 1
+ 1 em que Ω(s) e V(s) são as transformadas de Laplace davelocidade angular do rotor ω(t) e da tensão da armadura v(t),respectivamente.
Os parâmetros do modelo A ,em rad/s.V , e
 em segundos, são,respectivamente,
em segundos, são,respectivamente, A Cavitação também pode acontecer em bombas hidráulicas e causar problemas na operação e na durabilidade do equipamento. Sobre o fenômeno de Cavitação, assinale a alternativa correta.
A respeito de relés e contatores considere:
“Os relés têm funções auxiliares como os contatores auxiliares, mas são e têm configuração de contato diferente do contator, possuindo um ponto comum associado a um contato normalmente aberto e outro fechado. Além disso, os relés têm um tempo de manobra que os contatores, isto é, são_” (NASCIMENTO, 2013)
Assinale a alternativa que preencha correta e respectivamente as lacunas:
Em uma empresa, foi construído um elevador pneumático para descer cargas da produção. Para isso, um cilindro pneumático foi colocado abaixo de uma plataforma. Uma alavanca é utilizada para comutar uma válvula direcional, que envia ar comprimido para o cilindro, elevando a plataforma. Quando a alavanca retorna para a posição inicial (de repouso), a plataforma desce pela força da gravidade, expulsando o ar do cilindro pneumático.
É correto afirmar que a especificação da válvula direcional para que o sistema funcione adequadamente é:
Analise o seguinte diagrama elétrico.
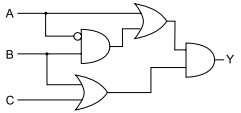
A expressão booleana simplificada que representa corretamente o diagrama elétrico é:
Analise o sinal plotado em uma tela de osciloscópio com o valor da escala horizontal igual a 250 ms/divisão e vertical igual a 300 ms/divisão, conforme imagem a seguir.
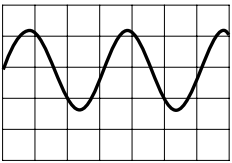
O valor da frequência do sinal, em hertz (Hz), é:
Analise o seguinte circuito.
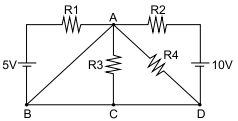
De acordo com as informações sobre o circuito, o valor
da queda de tensão no resistor R2, em volts (V), é:
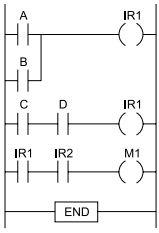
Considerando as informações apresentadas, a expressão lógica equivalente ao código Ladder é
A comunicação entre computadores e equipamentos pode ser realizada através de protocolos de redes de comunicação serial do tipo RS-232, também definido como EIA RS-232C. A comunicação serial nesse protocolo é estabelecida entre um DTE – Equipamento Terminal de Dados e um DCE – Equipamento de comunicação de Dados, através dos modos simplex, half-duplex e full-duplex.
Considerando os modos de transmissão do protocolo RS-232, o número mínimo de condutores necessários para o modo full-duplex é