Questões de Concurso Sobre mecatrônica
Foram encontradas 80 questões
Julgue o item subsequente, a respeito de instrumentação industrial e de conceitos sobre sistemas de supervisão.
Aferição de instrumento é uma operação que estabelece, sob
condições especificadas, uma relação entre os valores e as
incertezas de medição fornecidas por padrões e as indicações
correspondentes com as incertezas associadas.
Julgue o item subsequente, a respeito de instrumentação industrial e de conceitos sobre sistemas de supervisão.
O transdutor de medição, assim como o termopar, o eletrodo
de pH e o tubo de Bourdon, é um dispositivo que fornece
uma grandeza de saída, a qual tem uma relação especificada
com uma grandeza de entrada.
Julgue o item subsequente, a respeito de instrumentação industrial e de conceitos sobre sistemas de supervisão.
Transmissores são dispositivos que comutam grandezas
físicas em sinais elétricos mensuráveis sobre o estado do
processo e enviam os valores processados e interpretados
para sistemas de controle ou monitoramento.
Julgue o item subsequente, a respeito de instrumentação industrial e de conceitos sobre sistemas de supervisão.
O manômetro de tubo de pitot consiste em um tubo em
forma de U, feito de vidro ou plástico transparente e
preenchido com um fluido (geralmente mercúrio ou água),
utilizado para medir a pressão por diferença de velocidade
relativa, por meio da equação de Torricelli.
Julgue o item subsequente, a respeito de instrumentação industrial e de conceitos sobre sistemas de supervisão.
A telemetria pode ser integrada a um sistema SCADA
(supervisory control and data acquisition), o que permite a
manutenção preditiva com comunicação bidirecional,
monitoramento remoto, dados em tempo real e alarmes e
notificações que possibilitam a rápida tomada de medidas
corretivas.
Julgue o item subsequente, a respeito de instrumentação industrial e de conceitos sobre sistemas de supervisão.
Válvulas de segurança são usadas em situações em que
pequenas flutuações de pressão são aceitáveis e desejáveis,
como em sistemas de HVAC, enquanto as de alívio são
indicadas para os casos em que a subida súbita e significativa
de pressão possa representar riscos graves em tanques de
armazenamento, caldeiras e gasodutos.
I. Os módulos são específicos para cada tipo de sensor que for usado, não podendo medir temperatura com o modulo analógico utilizado para medir fluxo.
II. Com o módulo analógico, é possível capturar, processar e controlar sinais analógicos.
III. Com um modulo analógico, pode-se comunicar dispositivos como computadores.
IV. As variáveis analógicas caracterizam a representação contínua de uma grandeza física.
Quais estão corretas?
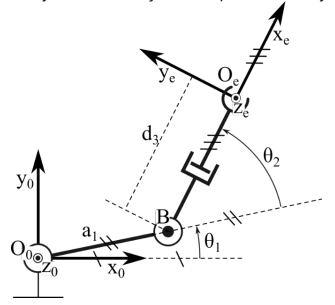
O robô RRP possui como base de referência o sistema de coordenadas O0–x0y0z0 e o sistema de coordenadas Oe–xeyeze fixo no elo do efetuador. A primeira junta de revolução tem seu eixo de rotação na direção e sentido do eixo z0 (perpendicular aos eixos x0 e y0, ou seja, saindo da página) passando pela origem do sistema de coordenadas da base em O0, com deslocamento de junta definido pelo ângulo θ1, medido entre o eixo x0 e a reta definida pelos pontos O0 e B, sobre o elo a1. A segunda junta de revolução tem eixo de rotação paralelo ao eixo da primeira junta de revolução, ou seja, na direção e sentido de z0, mas passando pelo ponto B, com deslocamento de junta definido pelo ângulo θ2, medido entre a reta definida entre os pontos O0 e B (alongamento tracejado na figura) e a reta definida entre os pontos B e a origem Oe. A terceira junta prismática tem seu eixo na direção e sentido do eixo xe (eixo x do sistema de coordenadas do efetuador) definido pela relação
xe = Oe − B / ‖Oe − B‖
passando pelo ponto B, com deslocamento d3, correspondente à distância entre os pontos B e Oe. Com respeito ao robô RRP, indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e assinale a alternativa com a sequência correta de cima para baixo.
( ) Não é possível gerar movimento de deslocamento para o efetuador do robô RRP na direção de z0. ( ) O robô RRP possui quatro graus de mobilidade. ( ) O volume de trabalho do robô RRP é cilíndrico. ( ) O robô RRP não possui singularidades.
( ) O CAPP tem por base três formas de planejamento do trabalho: variante, automático e generativo.
( ) O CAPP tem as seguintes etapas básicas: sequenciamento de operações; determinação do maquinário e ferramentas aplicáveis; lubrificação de peças; definição das condições de processo e respectivos tempos de fabricação.
( ) O CAM pode ser classificado em duas grandes categorias, de acordo com o sistema computacional: sistemas computadorizados de controle e monitoração e sistemas de suporte da produção.
( ) Sistemas como MRP e programação CNC são exemplos de CAM.
( ) Na forma variante de CAPP, as peças são classificadas de acordo com semelhanças de caráter geométrico ou de utilidade.
( ) No processo de conformação mecânica por calandragem predominam os esforços de flexão quando comparado aos processos de forjamento e laminação.
( ) Existem três processos de fabricação para a união permanente de materiais: colagem, brasagem e soldagem.
( ) No processo de soldagem MIG, o gás de proteção participa de alterações metalúrgicas da poça de fusão.
( ) Furação não é um tipo de usinagem.
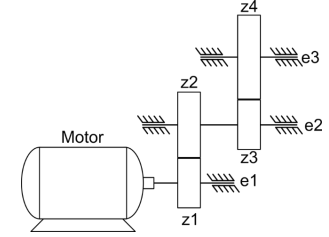
Considere as seguintes equações de acoplamento de duas engrenagens:
a) i = zs/ze ; b) ωe/ωs = i ; c) Te/Ts = 1/i ;
onde i é a relação de transmissão, zs é o número de dentes da engrenagem de saída, ze é o número de dentes da engrenagem de entrada, ωs é a velocidade angular na engrenagem de saída, ωe é a velocidade angular da engrenagem de entrada, Ts é o torque sobre o eixo da engrenagem de saída e Te é o torque sobre o eixo da engrenagem de entrada.
Para um dado valor de velocidade angular ω1 e torque T1 gerados pelo motor sobre e1, indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e assinale a alternativa com a sequência correta de cima para baixo.
( ) A velocidade angular resultante sobre e2 é a metade da velocidade angular sobre e1. ( ) A velocidade angular sobre e3 é 1/2 da velocidade angular sobre o eixo e2. ( ) O torque sobre o eixo e3 é duas vezes maior do torque sobre eixo e2. ( ) A relação de transmissão entre os eixos e3 e e1 é i = 4. ( ) Ao diminuir o número de dentes da primeira engrenagem para z1 = 12, a relação de transmissão entre os eixos e1 e e3 é amplificada para 12.
( ) Se a área A do rebite aumentar e a carga Q permanecer constante, a tensão admissível do material diminui.
( ) Se a área A do rebite diminuir e a carga Q permanecer constante, a tensão admissível do material diminui.
( ) A área do rebite varia proporcionalmente com a carga aplicada para que a tensão devido ao carregamento seja constante.
( ) Numa dada situação, ao ser trocado o rebite por outro rebite com material mais resistente e a carga permanecer constante, a área projetada do rebite pode diminuir.
( ) Os mancais são classificados como deslizantes ou de rolamento.
( ) Mancais de rolamento são aplicados quando se deseja reduzir o atrito na partida em eixos em movimentos rotativos.
( ) Os mancais de deslizamento dispõem de roletes, sendo aplicados em máquinas pesadas.
( ) Os rolamentos são classificados, de acordo a direção das forças que suportam, em radiais ou de tração.
( ) Em situações em que desalinhamentos de eixos ou montagem possam ocorrer, é recomendada a utilização de rolamentos autocompensadores de esferas.
( ) Rebites, cavilhas e pinos são elementos de máquina de fixação. ( ) O parafuso de rosca triangular tem aplicação na fixação de união de peças. ( ) Fusos de rosca quadrada têm aplicação na geração de movimento de ferramentas que sofrem esforços ou choques, como prensas e morsas. ( ) Atualmente as roscas triangulares são classificadas de acordo com seu perfil em três tipos: métrica, americana e Whitworth.
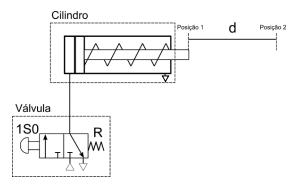
Com relação a esse circuito pneumático, indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e assinale a alternativa com a sequência correta de cima para baixo.
( ) A válvula é direcional do tipo 3/2. ( ) A válvula tem acionamento mecânico e retorno por mola. ( ) A válvula é normalmente fechada de controle por solenoide. ( ) O cilindro tem retorno por mola. ( ) Quando o acionamento 1S0 for ativado, o pistão do cilindro avança linearmente até a posição 2 e retorna automaticamente até a posição 1, repetindo esse ciclo até que 1S0 seja desativado.
I. As redes ASi são um exemplo típico de Sensorbus voltadas à comunicação de sensores e atuadores discretos.
II. As Devicebus são especificadas para comunicação de controladores lógicos programáveis e outros dispositivos de automação industrial cujas mensagens são predominantemente organizadas em bytes.
III. As altas taxas de transmissão de dados das redes Fieldbus garantem que os sinais digitais sejam transmitidos em tempo real entre os sensores e atuadores distribuídos nas malhas de controle do processo industrial.
IV. As barreiras de segurança intrínseca das redes Fieldbus permitem que estratégias de controle e de segurança sejam executas localmente nos atuadores instalados em áreas classificadas, sujeitas a risco de incêndio e explosão.
( ) A norma IEC 61131-3 especifica estas cinco linguagens para programação de CLP: Assembly, C, Diagrama de Contatos (Ladder Diagram), Diagrama de Blocos (Function Block Diagram) e Diagrama Sequencial (Sequencial Flow Chart).
( ) Em operação normal (modo RUN), o CLP realiza periodicamente o ciclo de varredura que basicamente grava as informações das portas de entradas nas respectivas memórias-imagem, processa a lógica programada e só então atualiza as portas de saída de acordo com o estado das respectivas memórias-imagem.
( ) Em razão da confiabilidade operacional, do alto desempenho de seus processadores, da alta capacidade de memória e do baixo custo, os CLPs industriais são os dispositivos mais indicados para o processamento de imagens em equipamentos de controle de qualidade da produção.
( ) Segundo a norma IEC 61131-3, a programação de CLPs em Diagrama de Contatos (Ladder Diagram) segue a mesma lógica de um circuito elétrico de relés, de modo que uma mudança na ordem em que os degraus (rungs) são programados no diagrama não pode alterar o comportamento gerado pelo CLP.