Questões de Concurso
Sobre algoritmos em algoritmos e estrutura de dados
Foram encontradas 1.944 questões
A = 1616
B = 1010
C = 102
O cálculo da soma de A + B + C é:
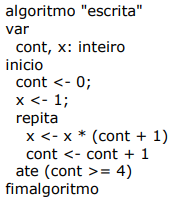
Ao final da execução do algoritmo acima, qual será o valor da variável “x”?
Analise o seguinte fluxograma:
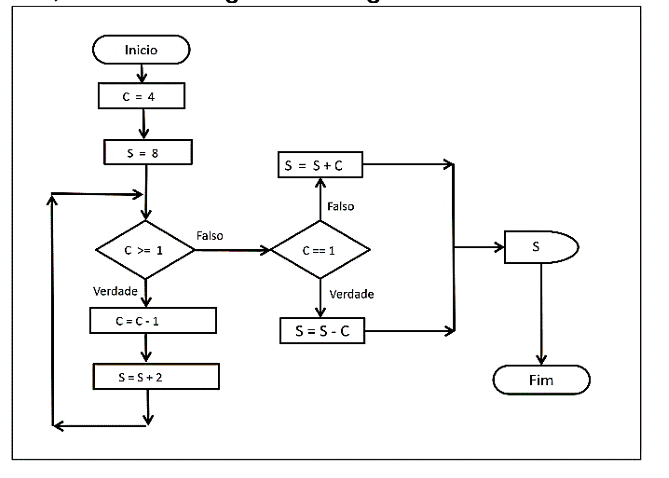
Após a execução do algoritmo será exibido ao usuário o valor:
Analise o seguinte fluxograma:
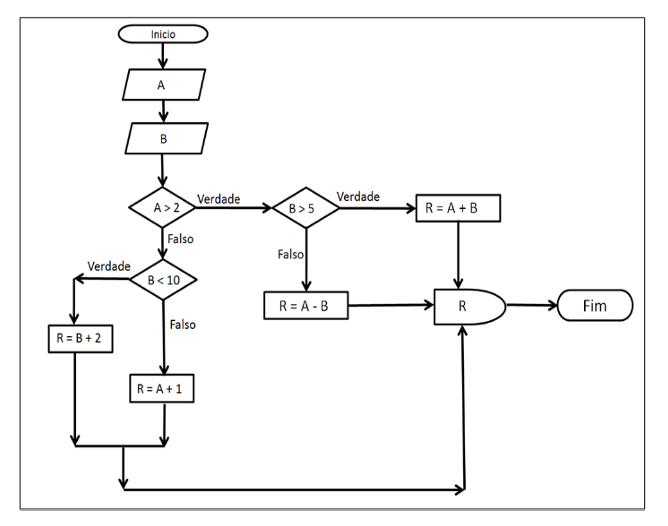
Supondo-se que o usuário entrou com os dados 10 e 6 (primeiro 10 e depois 6), após a execução do algoritmo será exibido ao usuário o valor:
Analise o algoritmo abaixo, que foi escrito no software VisuAlg 3.0:
algoritmo "cálculo_média"
var
qtd, cont, soma, media: inteiro
inicio
soma <- 0
leia(qtd)
para cont de 1 ate qtd faca
soma <- soma + cont
fimpara
media <- soma / cont
escreva(media)
fimalgoritmo
Analise o algoritmo abaixo em VisuAlg:
Assinale a alternativa que contém o resultado da execução desse algoritmo.
Coluna 1
1. Executar (F9).
2. Intervalo do timer.
3. Gerar valores aleatórios.
Coluna 2
( ) Inicia (ou continua) a execução automática do pseudocódigo.
( ) Atraso em cada linha, para quando se deseja executar o pseudocódigo mais lentamente.
( ) Ativa a geração de valores arbitrários que substituem a digitação de dados.
( ) Pode efetuar a geração de dados do tipo caractere sem faixa pré-estabelecida, gerando strings de 5 letras maiúsculas.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é:
I. É correto afirmar que algoritmo é todo conjunto de regras e conceitos necessários para criar códigos que serão interpretados e executados por um computador.
II. É correto afirmar que lógica de programação é uma sequência lógica de ações cujo objetivo é resolver um problema.
Marque a alternativa CORRETA:
( ) Os algoritmos de agrupamento hierárquicos são divididos em dois grupos principais: aglomerativos e divisíveis.
( ) O algoritmo de agrupamento aglomerativo é uma abordagem bottom-up que começa com todos os dados em um único cluster; os clusters são divididos progressivamente até que cada dado esteja em seu próprio cluster individual.
( ) Os algoritmos de agrupamento divisíveis são uma abordagem top-down, na qual um único cluster é dividido em vários clusters à medida que avançamos na hierarquia.
As afirmativas são, respectivamente,
( ) Em linguagens de programação, não é possível aninhar estruturas de repetição, ou seja, ter uma dentro da outra.
( ) A estrutura de repetição foreach é utilizada somente para iterações em que a ordem dos elementos não é importante.
( ) A utilização excessiva de instruções break e continue em estruturas de repetição é geralmente considerada uma boa prática de programação.
Assinale a alternativa que apresenta a sequência correta de cima para baixo.
Julgue o item a seguir.
Os fluxogramas são ferramentas gráficas utilizadas no
desenvolvimento de algoritmos para representar
visualmente o processo de execução de um código. Eles
são amplamente adotados devido à sua capacidade de
oferecer uma visualização clara dos passos de um
processo, sendo assim mais facilmente compreendidos
por diferentes profissionais, inclusive aqueles fora da área
de programação.
Julgue o item a seguir.
Um pseudocódigo é uma representação textual de um
algoritmo, utilizada para planejar e estruturar soluções
algorítmicas antes de sua implementação em uma
linguagem de programação específica. Sua elaboração
inclui a compreensão do problema, divisão em etapas,
identificação de variáveis, definição da lógica usando
estruturas de controle, e adição de comentários
explicativos para melhor clareza.
Julgue o item a seguir.
Fluxogramas são ferramentas obsoletas no processo de
desenvolvimento de algoritmos, sendo raramente usados
na prática atual de programação. Eles são considerados
ineficazes para representar algoritmos complexos e não
são adotados por profissionais da área de tecnologia da
informação, como analistas de sistemas e cientistas da
computação.
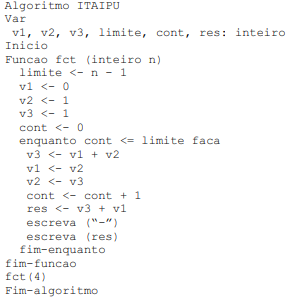
Considerando que o algoritmo acima está expresso na forma de um pseudocódigo, assinale a opção que apresenta o resultado desse algoritmo quando ele for executado.
Considerando-se que n corresponde ao número de features e m ao número de instâncias, qual é a complexidade computacional assintótica de predição para árvores de decisão treinadas com o algoritmo CART?
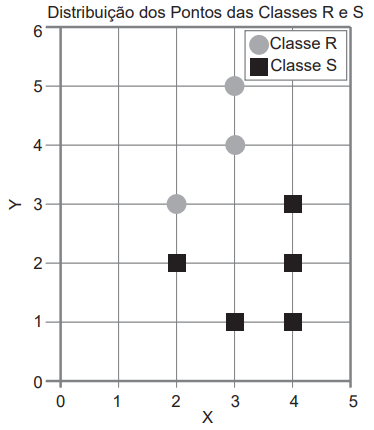
Nesse contexto, as classes dos pontos [(3,2),(3,3) e (4,4)] são, respectivamente:
Essas duas formas de avaliar um modelo são conhecidas, respectivamente, como