Questões de Concurso
Sobre conceitos básicos e algoritmos em algoritmos e estrutura de dados
Foram encontradas 756 questões
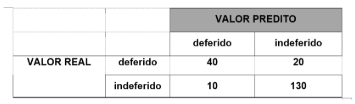
Os valores da performance geral, da sensibilidade e da precisão do modelo são, respectivamente:
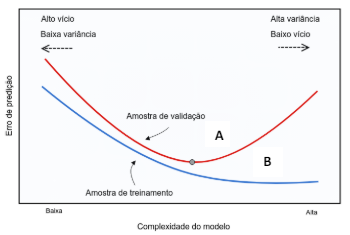
Disponível em: <http://cursos.leg.ufpr.br/ML4all/apoio/reamostragem.html>. Acesso em: mar. 2024.
O gráfico representa as regiões de overfitting e underfitting, permitindo uma avaliação do relacionamento da complexidade do modelo de aprendizagem de máquina com o erro de predição. A partir do exposto no gráfico, o erro de generalização do modelo ocorre na região:
A = 1616
B = 1010
C = 102
O cálculo da soma de A + B + C é:
A técnica de memória virtual por paginação é organizada em blocos. Esses blocos podem ser alocados em páginas da memória física, mas eventualmente um bloco pode precisar ser substituído para liberar espaço. Assinale a opção que apresenta um algoritmo de substituição de páginas que utiliza um bit adicional, conhecido como bit de referência.
Analise o algoritmo abaixo em VisuAlg:
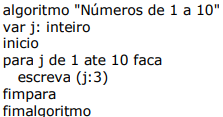
Assinale a alternativa que contém o resultado da execução desse algoritmo.
Coluna 1
1. Executar (F9).
2. Intervalo do timer.
3. Gerar valores aleatórios.
Coluna 2
( ) Inicia (ou continua) a execução automática do pseudocódigo.
( ) Atraso em cada linha, para quando se deseja executar o pseudocódigo mais lentamente.
( ) Ativa a geração de valores arbitrários que substituem a digitação de dados.
( ) Pode efetuar a geração de dados do tipo caractere sem faixa pré-estabelecida, gerando strings de 5 letras maiúsculas.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é:
Julgue o item a seguir.
Um pseudocódigo é uma representação textual de um
algoritmo, utilizada para planejar e estruturar soluções
algorítmicas antes de sua implementação em uma
linguagem de programação específica. Sua elaboração
inclui a compreensão do problema, divisão em etapas,
identificação de variáveis, definição da lógica usando
estruturas de controle, e adição de comentários
explicativos para melhor clareza.
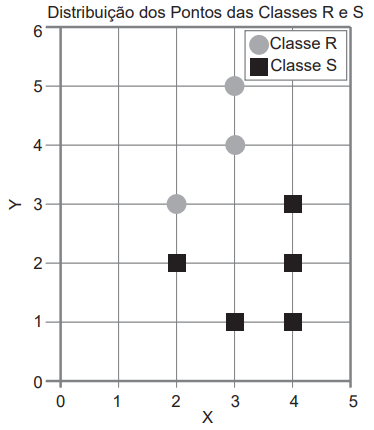
Nesse contexto, as classes dos pontos [(3,2),(3,3) e (4,4)] são, respectivamente:
Essas duas formas de avaliar um modelo são conhecidas, respectivamente, como
Assinale a alternativa que preenche, correta e respectivamente, as lacunas do trecho acima.
Julgue o item a seguir, relativo a algoritmos de linguagem de programação.
Na instrução A(i) = FUNC(i), a saída da função FUNC( )
é passada corretamente como parâmetro de entrada (i) para
a função A.
Julgue o item a seguir, relativo a algoritmos de linguagem de programação.
Os dados de um algoritmo devem ser definidos por tipos
para que seus conteúdos possam ser submetidos a operações
corretas, inerentes a cada tipo de dado.
Julgue o item a seguir, relativo a algoritmos de linguagem de programação.
O pseudocódigo consiste em um texto estruturado com
comandos escritos em linguagem humana, no qual se apoia a
criação dos algoritmos computacionais.
Sobre a notação de ponto flutuante, assinale a alternativa incorreta.
Esse modo de operação é o