Questões de Concurso Público Transpetro 2011 para Engenheiro Júnior - Automação
Foram encontradas 70 questões
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192344
Engenharia de Automação
Um sistema linear é representado em Espaço de Estados pelas equações:

Os polos desse sistema são
Os polos desse sistema são
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192345
Matemática
O determinante da matriz 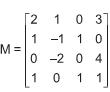 é
é
é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192346
Engenharia de Automação
A famosa sequência de Fibonacci pode ser definida como o sinal x(n), discreto, causal e infinito, cujas primeiras amostras são

A sua lei de formação para pode ser expressa como
pode ser expressa como 
Aplicando a Transformada Z no sinal x(n), resulta a expressão
A sua lei de formação para
pode ser expressa como Aplicando a Transformada Z no sinal x(n), resulta a expressão
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192347
Engenharia de Automação
Costuma-se aproximar a variável complexa z, usada em sistemas discretos (digitais), pela variável também complexa w para sistemas contínuos, através da relação de transformação  onde T (real positivo) é o período de amostragem usado na discretização do sinal contínuo.
onde T (real positivo) é o período de amostragem usado na discretização do sinal contínuo.
Sabe-se que a região de estabilidade para sistemas contínuos é o SPE, ou seja, o Semiplano da Esquerda do plano complexo da variável w, que pode ser definida por Re[w] < 0.
O lugar geométrico, no plano da variável z, dos pontos em que Re[w] < 0, é a região interior ao círculo de raio igual a (A) 1 e centro na origem
onde T (real positivo) é o período de amostragem usado na discretização do sinal contínuo.Sabe-se que a região de estabilidade para sistemas contínuos é o SPE, ou seja, o Semiplano da Esquerda do plano complexo da variável w, que pode ser definida por Re[w] < 0.
O lugar geométrico, no plano da variável z, dos pontos em que Re[w] < 0, é a região interior ao círculo de raio igual a (A) 1 e centro na origem
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192348
Engenharia de Automação
Texto associado
Considere o enunciado para responder a questão a seguir.

O diagrama em blocos da figura acima mostra uma confi-
guração em malha fechada. Sabe-se que
 e K é uma constante positiva.
e K é uma constante positiva.
O diagrama em blocos da figura acima mostra uma confi-
guração em malha fechada. Sabe-se que
e K é uma constante positiva.
A Função de Transferência que relaciona Y(s) com R(s) é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192349
Engenharia de Automação
Texto associado
Considere o enunciado para responder a questão a seguir.
O diagrama em blocos da figura acima mostra uma confi-
guração em malha fechada. Sabe-se que e K é uma constante positiva.
O diagrama em blocos da figura acima mostra uma confi-
guração em malha fechada. Sabe-se que
e K é uma constante positiva.
O valor de K que garante os polos em malha fechada posicionados em -10, (-2,5 + j2,5√5) e (-2,5 - j2,5√5) é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192350
Engenharia de Automação
O polinômio do denominador da função de transferência de um sistema em malha fechada é dado por
s3 + 9s2 + 23s + 15 + K
Variando K positivamente a partir de K = 0, o valor de K a partir do qual o sistema vai para a instabilidade é
s3 + 9s2 + 23s + 15 + K
Variando K positivamente a partir de K = 0, o valor de K a partir do qual o sistema vai para a instabilidade é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192351
Engenharia de Automação
Um sistema discreto tem como entrada r(n) e saída y(n), que se relacionam pelas equações de diferenças
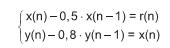
A função de Transferência do sistema
A função de Transferência do sistema
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192352
Engenharia de Automação
O modelo em função de transferência de um sistema linear contínuo é dado por
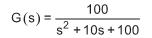
Para esse sistema, foi obtido um modelo equivalente discreto, com zero order hold, usando um período de amostragem de 10 ms. Considere que, para uma entrada degrau unitário, o tempo de acomodação (settling time) da resposta é calculado por , onde ς é a razão de amortecimento, e ωn é a frequência natural não amortecida do sistema contínuo.
, onde ς é a razão de amortecimento, e ωn é a frequência natural não amortecida do sistema contínuo.
Supondo que o sistema discretizado tenha o mesmo desempenho que o sistema contínuo, aproximadamente, quantas amostras levará o sistema discreto para atingir o estado estacionário, partindo do instante inicial?
Para esse sistema, foi obtido um modelo equivalente discreto, com zero order hold, usando um período de amostragem de 10 ms. Considere que, para uma entrada degrau unitário, o tempo de acomodação (settling time) da resposta é calculado por
, onde ς é a razão de amortecimento, e ωn é a frequência natural não amortecida do sistema contínuo. Supondo que o sistema discretizado tenha o mesmo desempenho que o sistema contínuo, aproximadamente, quantas amostras levará o sistema discreto para atingir o estado estacionário, partindo do instante inicial?
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192353
Engenharia de Automação
A equação recursiva a seguir gera a sequência causal y(n).
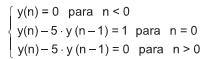
A expressão de y(n) para n ≥ 0 é
A expressão de y(n) para n ≥ 0 é