Questões de Concurso Público IFB 2017 para Professor - Mecatrônica
Foram encontradas 50 questões
( ) A Administração Pública Direta e Indireta deve considerar na prática dos atos administrativos os princípios da legalidade, pessoalidade, moralidade, publicidade e eficiência. ( ) O servidor público estável perderá o cargo em virtude de sentença penal condenatória. ( ) Se um servidor público estável tiver seu cargo extinto, ficará em disponibilidade e terá garantida remuneração até seu adequado aproveitamento em outro cargo. ( ) Como condição para a aquisição da estabilidade, o servidor público poderá ter que se submeter a avaliação de desempenho. ( ) Sem prejuízo da ação penal cabível, os atos de improbidade administrativa acarretarão na suspensão dos direitos políticos, na perda da função pública, na indisponibilidade dos bens e no ressarcimento ao erário.
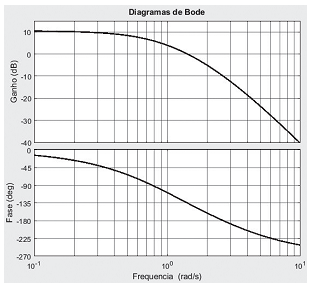
Determine as Margens de Ganho (MG) e de Fase (MF) nos diagramas de Bode em Malha Aberta e conclua sobre a estabilidade do sistema em Malha Fechada.
Dados os Diagramas de Bode de um sistema de primeira ordem em Malha Aberta, determine
os valores de K e  da equação mostrada abaixo.
da equação mostrada abaixo.
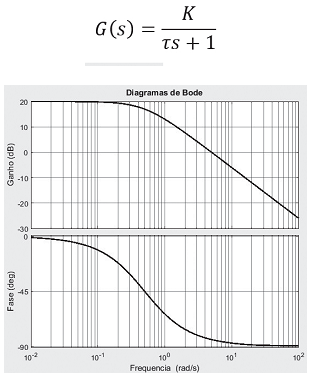
Os valores de K e  são:
são:
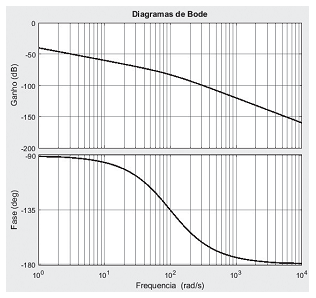
Considerando os Diagramas de Bode de um sistema de segunda ordem, mostrados abaixo, identifique os polos desse sistema.
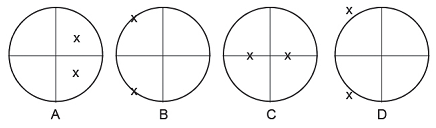
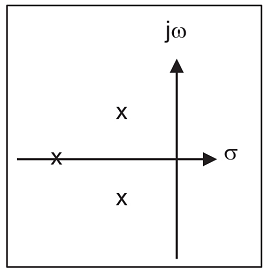
Dada a distribuição de polos de um sistema em Malha Aberta mostrada na figura a seguir, conclua sobre a estabilidade do sistema em Malha Fechada.
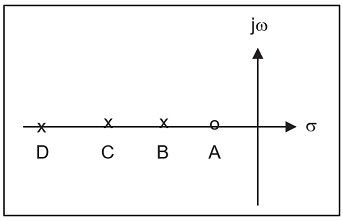
Considerando a distribuição de polos e zeros de um sistema em Malha Aberta no plano s, mostrada a seguir, indique o Lugar Geométrico das Raízes para o sistema em Malha Fechada.
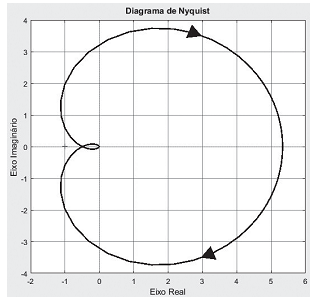
De acordo com o Diagrama de Nyquist de um sistema em Malha Aberta, mostrado a seguir, conclua sobre a sua estabilidade em Malha Fechada.
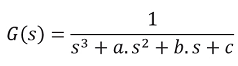
Utilize o método de Routh-Hurwitz para determinar os valores de a, b e c que garantem a estabilidade do sistema:
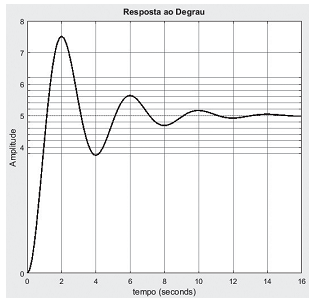
Dada a resposta ao degrau de um sistema dinâmico, determine os valores do sobressinal (Mp) e do tempo de acomodação (ta) para um critério de erro de 5%.
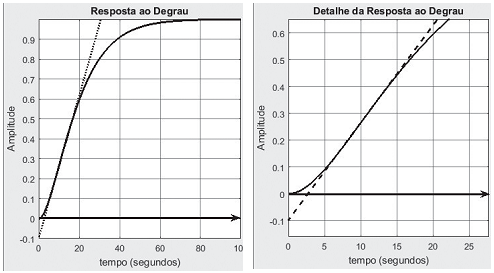
Segundo a Resposta ao Degrau em Malha Aberta de um sistema de primeira ordem com atraso, determine os parâmetros de um controlador PID utilizando o método de Ziegler-Nichols (Kp = 1,2/A, Ti = 2L, Td = L/2).
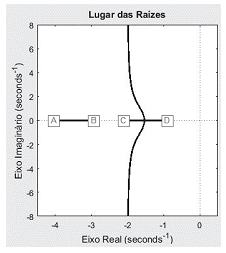
Na figura a seguir, A e B representam as posições dos polos de um sistema em Malha Aberta. Os pontos C e D representam as posições desejadas dos polos A e B em Malha Fechada. Selecione a opção que permitirá construir um compensador por avanço de fase para alcançar o objetivo desejado.

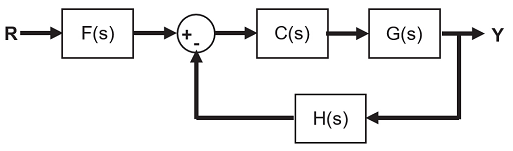
Determine a relação entre Y e R no sistema a seguir.
De acordo com o Lugar Geométrico das Raízes apresentado na figura a seguir, identifique os tipos das raízes presentes no sistema.
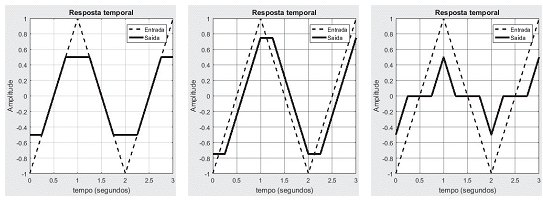
Levando em consideração as respostas ao degrau de três sistemas apresentadas a seguir, identifique as não-linearidades relacionadas.
Dadas as distribuições de polos no plano Z para sistemas em Malha Aberta, conclua sobre a resposta temporal e a estabilidade dos sistemas em Malha Fechada.