Questões de Concurso Comentadas por alunos sobre sistemas de controle em engenharia eletrônica
Foram encontradas 361 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Seja um sistema de 2a ordem, linear e analógico, que liga um sinal U de entrada ao sinal Y de saída e cujo modelo é representado pela função de transferência
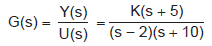
Esse modelo foi submetido a uma realimentação proporcional de saída, fazendo com que o ganho K varie no intervalo 0 < K < + ∞.
Na configuração acima descrita, vai ocorrer que, para um determinado valor do ganho K, um dos dois polos de malha fechada será zero, e o outro polo, consequentemente, terá valor igual a
Um sistema linear de 2a ordem é modelado em função de transferência por uma planta do tipo G(s) = K N(s)/ D(s) , em que N(s)é o polinômio do numerador, e D(s) é o polinômio do denominador.
Quando esse sistema é submetido a uma realimentação proporcional de saída, e o ganho K varia de 0 a + ∞ , os polos se movimentam no plano complexo, formando trajetórias que se caracterizam como o lugar das raízes, mostrado na Figura a seguir.
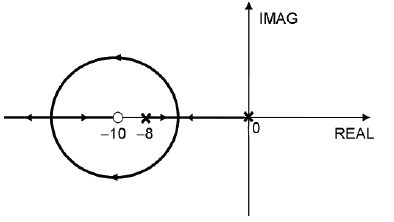
Com base nos dados da Figura acima, a expressão da Função de Transferência de Malha Fechada em função do ganho K é
Um engenheiro deseja alocar os polos do sistema, representado pelas equações de estado abaixo, para as posições -1, -3 e -6.
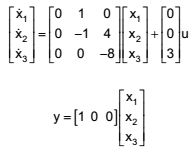
Levando-se em conta a função de transferência equivalente do sistema, qual o controlador K de realimentação de estados
que esse engenheiro deve projetar?
Para analisar o comportamento de um sistema representado pela função de transferência 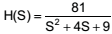 um engenheiro
está interessado em determinar as margens de ganho e fase do sistema, utilizando os diagramas de Bode ilustrados
na Figura abaixo.
um engenheiro
está interessado em determinar as margens de ganho e fase do sistema, utilizando os diagramas de Bode ilustrados
na Figura abaixo.
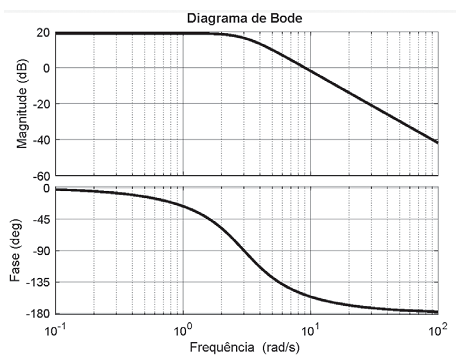
Qual a margem de fase aproximada desse sistema, em graus?
Um engenheiro de equipamentos está trabalhando em uma planta que pode ser representada pelo diagrama de blocos abaixo, em que r(t) e y(t) são a entrada e saída dessa planta, respectivamente.
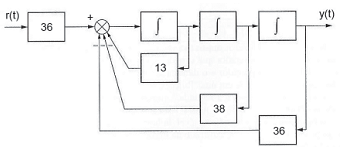
Após análise do diagrama, conclui-se que a função de
transferência do sistema é representada por