Questões de Concurso
Para automação
Foram encontradas 376 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541193
Engenharia de Automação
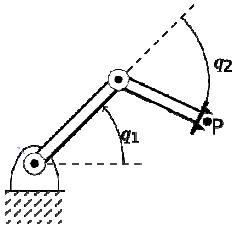
Seja o manipulador planar da figura abaixo, com duas juntas rotacionais, cujas posições são definidas pelas variáveis q1 e q2. O efetuador final está montado no elo 2, e sua posição é definida pelo ponto P. Em relação à cinemática desse manipulador, é INCORRETO afirmar:
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541192
Engenharia de Automação
Em relação às afirmativas abaixo sobre a definição de graus de liberdade de um manipulador.
I. Número de variáveis independentes necessárias para especificar completamente a configuração de uma cadeia cinemática em relação a uma referência.
II. Dimensão do espaço de configuração de um manipulador.
III. Número de juntas de um manipulador, serial ou paralelo.
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):
I. Número de variáveis independentes necessárias para especificar completamente a configuração de uma cadeia cinemática em relação a uma referência.
II. Dimensão do espaço de configuração de um manipulador.
III. Número de juntas de um manipulador, serial ou paralelo.
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541191
Engenharia de Automação
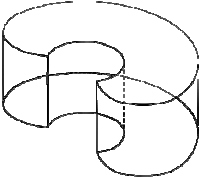
O robô manipulador que apresenta o volume de trabalho característico mostrado na figura abaixo pode ser cinematicamente classificado como:
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541190
Engenharia de Automação
Os ângulos Roll-Pitch-Yaw (RPY) são usados como representação mínima de orientação. Em certas posturas de um corpo rígido, porém, podem ocorrer singularidades de representação, ou seja, não é possível obter um único conjunto de ângulos RPY a partir da matriz de rotação. A única alternativa de representação de orientação que NÃO apresenta esse problema é:
Ano: 2014
Banca:
CETRO
Órgão:
AEB
Prova:
CETRO - 2014 - AEB - Tecnologista Júnior - Desenvolvimento Tecnológico |
Q483870
Engenharia de Automação
Quando se utiliza um controlador proporcional, integrativo e derivativo PID (Proporcional Integrativo Derivativo), cada parcela deve ser ajustada aumentando ou diminuindo seu fator de ganho. Imagine um veículo que deve seguir um curso estável. Ele apresenta um deslocamento em relação à posição desejada, mantendo um erro estacionário. Assinale a alternativa que apresenta a alteração que deve ser realizada no PID para reduzir esse tipo de erro.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
SERPRO
Prova:
CESPE - 2013 - SERPRO - Analista - Engenharia em Segurança do Trabalho |
Q343834
Engenharia de Automação
Texto associado
A respeito de sistemas elétricos de potência, subestações e no-breaks, julgue os próximos itens.
No-break é o conjunto de equipamentos de manobra e(ou) transformação usado para dirigir o fluxo de energia em sistema de potência e possibilitar a sua diversificação por meio de rotas alternativas, possuindo dispositivos de proteção capazes de detectar os diferentes tipos de faltas que ocorrem no sistema e de isolar os trechos onde essas faltas ocorrem.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
SERPRO
Prova:
CESPE - 2013 - SERPRO - Analista - Engenharia em Segurança do Trabalho |
Q343833
Engenharia de Automação
Texto associado
A respeito de sistemas elétricos de potência, subestações e no-breaks, julgue os próximos itens.
s sistemas elétricos de potência constituem o conjunto de equipamentos que operam de maneira coordenada com a finalidade de fornecer energia elétrica aos consumidores, dentro de certos padrões de qualidade, segurança e custos, com o mínimo impacto ambiental.
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador Tecnologista - Metrologia em Informática |
Q267632
Engenharia de Automação
Um sistema de medição pode ser dividido funcionalmente em etapas, sendo que as três primeiras são denominadas de sensoriamento, condicionamento de sinal e processamento de sinal. A esse respeito, assinale a opção correta.
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador Tecnologista - Metrologia em Informática |
Q267631
Engenharia de Automação
Um sinal contínuo no tempo, com espectro de frequências limitado, ao ser amostrado a uma taxa constante gera um sinal discreto no tempo. O sinal discreto no tempo possui como característica o fato de
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador Tecnologista - Metrologia em Informática |
Q267630
Engenharia de Automação
Para conversão analógica-digital em sistemas de controle digital e processamento digital de sinais, utiliza-se um procedimento de retenção de ordem zero (zero-order-hold). Nesse procedimento, o sinal
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador Tecnologista - Metrologia em Informática |
Q267629
Engenharia de Automação
Em sistemas de controle liga-desliga (on-off), que, por natureza, são não lineares, admite-se uma variação da variável de saída do sistema em torno do valor de referência estipulado (setpoint). O chaveamento do sinal de controle apresenta uma histerese com largura definida. Se a largura de histerese do controlador diminui,
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador Tecnologista - Metrologia em Informática |
Q267628
Engenharia de Automação
Em sistema de controle em malha fechada com realimentação não unitária, o método do lugar geométrico das raízes, que permite mostrar a disposição dos polos em malha fechada em termos de algum parâmetro do sistema, é obtido a partir da
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador Tecnologista - Metrologia em Informática |
Q267627
Engenharia de Automação
A resposta em frequência de sistemas lineares está relacionada ao desempenho dinâmico destes, tanto em termos de resposta transitória quanto em termos de resposta em regime permanente. Um sistema com maior largura de banda apresenta
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador Tecnologista - Metrologia em Informática |
Q267626
Engenharia de Automação
Um sistema linear cuja função de transferência seja dada por 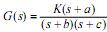 , em que K, a, b e c são números reais, será estável se
, em que K, a, b e c são números reais, será estável se
, em que K, a, b e c são números reais, será estável se
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador Tecnologista - Metrologia em Informática |
Q267625
Engenharia de Automação
O controlador lógico programável (CLP) é utilizado nas plantas industriais para automatizar processos, por meio de um adequado sequenciamento das etapas associadas. O dispositivo é composto, basicamente, por unidades de entrada (digitais e analógicas), unidade de processamento e unidades de saída (digitais e analógicas), além de, possivelmente, outras unidades específicas. Um circuito que pode fazer parte do CLP é o WDT (watch dog timer), cuja função é monitorar
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador Tecnologista - Metrologia em Informática |
Q267624
Engenharia de Automação
Em sistemas dinâmicos lineares e contínuos, a resposta ao impulso, também denominada função de ponderação, corresponde a uma forma de representação do sistema no domínio do tempo. Conhecendo-se a resposta impulsiva, a resposta do sistema a outros tipos de excitação pode ser corretamente obtida
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262984
Engenharia de Automação
O controle do processo de automação de uma indústria utiliza o sistema mecânico mostrado no esboço abaixo.
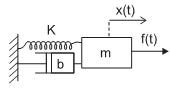
Utilizando as grandezas que aparecem na figura, e considerando que o termo forçante f(t) é a entrada, e a posição da massa x(t) é a saída, a função de transferência do sistema mecânico G(s)=x(s)/F(s) é igual a
Utilizando as grandezas que aparecem na figura, e considerando que o termo forçante f(t) é a entrada, e a posição da massa x(t) é a saída, a função de transferência do sistema mecânico G(s)=x(s)/F(s) é igual a
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262983
Engenharia de Automação
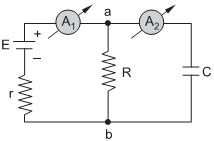
A análise de um projeto de automação indicou a presença do circuito ilustrado como elemento auxiliar, alimentado por corrente contínua.
Se a resistência R mede
 o amperímetro A1 indica 2A, a capacitância é de
o amperímetro A1 indica 2A, a capacitância é de  e o capacitor já se encontra totalmente carregado, a indicação no amperímetro A2 e a carga armazenada no capacitor são, respectivamente,
e o capacitor já se encontra totalmente carregado, a indicação no amperímetro A2 e a carga armazenada no capacitor são, respectivamente,
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262980
Engenharia de Automação
O engenheiro responsável por sistemas de automação deve atender às especificações das tarefas a serem realizadas. Alguns desses fatores devem ser interpretados através de modelos matemáticos.
Um fator que NÃO está associado a interpretações através de modelos matemáticos é o(a)
Um fator que NÃO está associado a interpretações através de modelos matemáticos é o(a)
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262979
Engenharia de Automação
O projeto de automação de uma empresa especificou elementos de controle com mais de uma entrada, produzindo componentes de erro em estado estacionário em situações como a do sistema a seguir.
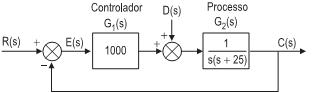
Podemos afirmar que o valor da componente do erro, nesse caso, é:
Podemos afirmar que o valor da componente do erro, nesse caso, é: