Questões Militares de Engenharia de Automação - Automação Industrial para Engenharia de Automação
Foram encontradas 20 questões
Ano: 2012
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2012 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q641368
Engenharia de Automação
De acordo com a Federação Internacional de Robótica (IFR),
assinale a opção que NÃO apresenta uma configuração básica
de robô, quanto à estrutura mecânica.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251560
Engenharia de Automação
Em relação às propriedades das matrizes e dos determinantes, assinale a opção correta.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251559
Engenharia de Automação
Observe a seguinte figura.
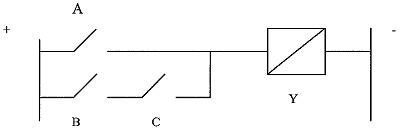
Na linguagem LADDER, cada contato, ao assumir dois estados, representa uma variável booleana.
Assinale a opção que apresenta a expressão booleana que representa o circuito acima.
Na linguagem LADDER, cada contato, ao assumir dois estados, representa uma variável booleana.
Assinale a opção que apresenta a expressão booleana que representa o circuito acima.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251555
Engenharia de Automação
Considere a matriz B apresentada a seguir.
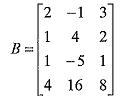
Assinale a opção que apresenta, respectivamente, o valor correspondente ao posto e à nulidade desta matriz.
Assinale a opção que apresenta, respectivamente, o valor correspondente ao posto e à nulidade desta matriz.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251551
Engenharia de Automação
Considere a transformação linear T: R3-→ R2 e as bases ß e β' apresentadas a seguir.
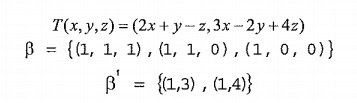
Assinale a opção que apresenta a matriz associada à transformação linear T em relação às bases ß e ß'.
associada à transformação linear T em relação às bases ß e ß'.
Assinale a opção que apresenta a matriz
associada à transformação linear T em relação às bases ß e ß'.