Questões Militares de Engenharia de Automação - Automação Industrial para Engenharia de Automação
Foram encontradas 20 questões
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251548
Engenharia de Automação
Considere as matrizes A e B apresentadas a seguir.

Em relação às matrizes acima, é correto afirmar que os
Em relação às matrizes acima, é correto afirmar que os
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251547
Engenharia de Automação
Com relação às propriedades das matrizes, assinale a opção INCORRETA .
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251534
Engenharia de Automação
Considere o oscilador tipo pêndulo de massa M e comprimento L apresentado a seguir.

Assinale a opção que apresenta uma aproximação linear do torque T, em função do ângulo θ, em torno do ponto de equilíbrio (θ= 0) , razoavelmente precisa para -π/4≤θ≤π/ 4.
Assinale a opção que apresenta uma aproximação linear do torque T, em função do ângulo θ, em torno do ponto de equilíbrio (θ= 0) , razoavelmente precisa para -π/4≤θ≤π/ 4.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251529
Engenharia de Automação
Coloque F (falso) ou V (verdadeiro) nas afirmativas abaixo, em relação à seleção de robôs industriais, assinalando a seguir a opção correta.
( ) A flexibilidade é um dos objetivos de um projeto de robotização.
( ) Dentre as três estratégias básicas de fabricação - manual, sistemas flexíveis e automação rígida -, somente o custo unitário de cada estratégia deve ser considerado na escolha da mais adequada.
( ) A especificação do método de programação é uma consideração técnica que deve ser analisada por ocasião da escolha do robô.
( ) Na análise de viabilidade econômica de um projeto de robotização, deve-se considerar que um robô não proporciona flexibilidade para atender às mudanças de mercado.
( ) O melhor arranjo físico para um robô industrial considera apenas as distâncias dos movimentos relacionados ao cumprimento da tarefa.
( ) A flexibilidade é um dos objetivos de um projeto de robotização.
( ) Dentre as três estratégias básicas de fabricação - manual, sistemas flexíveis e automação rígida -, somente o custo unitário de cada estratégia deve ser considerado na escolha da mais adequada.
( ) A especificação do método de programação é uma consideração técnica que deve ser analisada por ocasião da escolha do robô.
( ) Na análise de viabilidade econômica de um projeto de robotização, deve-se considerar que um robô não proporciona flexibilidade para atender às mudanças de mercado.
( ) O melhor arranjo físico para um robô industrial considera apenas as distâncias dos movimentos relacionados ao cumprimento da tarefa.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251521
Engenharia de Automação
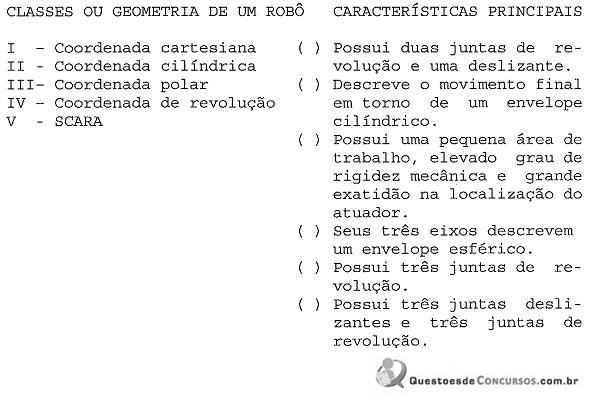
Correlacione as classes ou geometria de um robô às suas características principais e assina1e a opção correta.