Questões Militares
Sobre robótica e automação em engenharia de automação
Foram encontradas 27 questões
De acordo com o Teorema da Amostragem, ou Teorema de Nyquist, em um sinal contínuo no tempo, se a frequência de amostragem é suficientemente alta quando comparada ao componente da frequência mais alta envolvida nesse sinal, as características de amplitude do sinal contínuo no tempo podem ser preservadas em envelope do sinal amostrado.
Sendo assim, pode-se afirmar que quando essa condição não é respeitada, observa-se a ocorrência do fenômeno denominado:
Analise a figura abaixo.
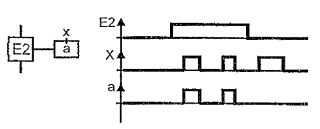
Qual é o tipo de ordem do GRAFCET representado na figura
acima ?
Analise o robô com pêndulo duplo da figura abaixo.

Analise as afirmativas abaixo referentes à seleção de robôs.
I - A decisão sobre o emprego ou não de robôs industriais se insere na análise global de investimentos de uma empresa .
II - A implantação de um sistema de produção robótico será mais bem realizada num processo com múltiplos passos, que envolve não apenas o robô, mas também o produto, os equipamentos de produção, o arranjo físico, entre outros fatores.
III- O processo de seleção envolve, em geral, várias interações entre micro e macro aspectos para uma solução satisfatória .
Assinale a opção correta.
I - O controle de duas posições é relativamente simples e barato e, por esta razão, extremamente utilizado tanto em sistemas de controle industriais como em sistemas de controle domésticos.
II - Considere-se u(t) o sinal de saída do controlador e e(t) o sinal de erro atuante. Em um controle de duas posições, o sinal u(t)sempre permanece igual a um valor máximo, independente do sinal de erro atuante ser positivo ou negativo.
III- Em um sistema de controle de duas posições, o elemento atuante possui apenas duas posições fixas que são, em muitos casos, simplesmente "ligado" ou "deligado" .
Assinale a opção correta.
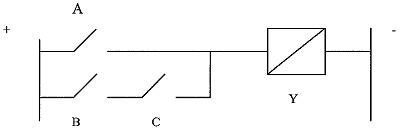
Na linguagem LADDER, cada contato, ao assumir dois estados, representa uma variável booleana.
Assinale a opção que apresenta a expressão booleana que representa o circuito acima.
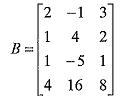
Assinale a opção que apresenta, respectivamente, o valor correspondente ao posto e à nulidade desta matriz.
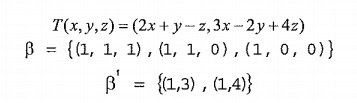
Assinale a opção que apresenta a matriz
 associada à transformação linear T em relação às bases ß e ß'.
associada à transformação linear T em relação às bases ß e ß'.