Questões Militares
Sobre controladores (proporcional, pi e pid) em engenharia eletrônica
Foram encontradas 17 questões
Ao aplicar-se uma função de grau r(t) com amplitude 5 à entrada de um sistema de controle por realimentação negativa, representado pela função de transferência Gp(s), obtem-se a resposta temporal: c(t) = 3∙t.
Considere:

Em relação à estabilidade do sistema de controle, é correto afirmar que:
A Ladder foi uma das primeiras linguagens destinadas à programação de controladores lógicos programáveis. Associe corretamente as saídas dessa programação à sua definição.
SAÍDAS
(1) Set
(2) À rele
(3) Digital
(4) Simples
(5) Complementar
DEFINIÇÕES
( ) Comando de cargas que trabalham com tensão alternada ou contínua.
( ) Acionada de acordo com a programação feita pelo usuário e é considerada do tipo NPN ou PNP.
( ) Transferência para o endereço associado a ela do valor de tensão oposto ao de sua entrada.
( ) Acionamento e sua retenção de um operando de saída quando, na entrada associada a ela, houver um pulso.
( ) Transferência para o endereço associado a ela do valor de tensão que estiver em sua entrada.
A sequência correta é
Associe as colunas relacionando a forma de atuação básica de controle com suas respetivas características.
FORMA DE ATUAÇÃO BÁSICA DE CONTROLE
(P) Proporcional (I) Integrativo (D) Derivativo
CARACTERÍSTICAS
( ) Tem a capacidade de atuar no controle enquanto houver erro. ( ) Produz correção significativa antes de o valor do erro atuante tornar-se grande. ( ) Atua na proporção da diferença entre o ponto de ajuste e a variável de processo. ( ) Leva o erro de estado estacionário para zero após tempo suficientemente longo. ( ) Produz um erro de estado estacionário de alguma intensidade. ( ) Responde em função do comportamento histórico recém passado do erro. ( ) Antecipa o erro atuante colaborando para aumentar a estabilidade do sistema.
A sequência correta dessa associação é:
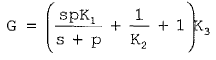
Analise os gráficos abaixo.
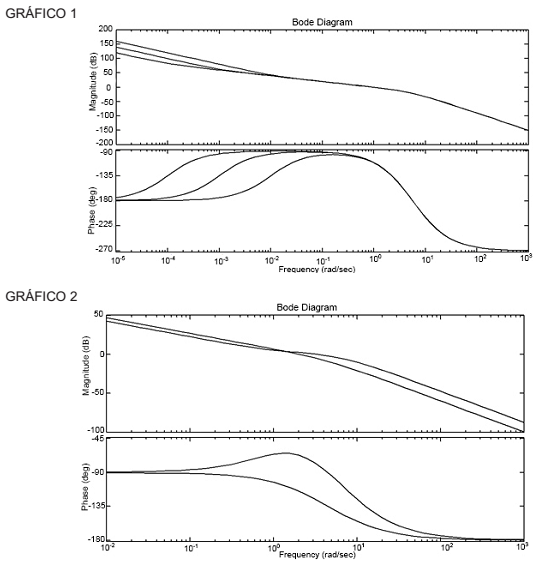
Quais ações de controle foram implementadas, respectivamente, em cada um deles?
Admitindo-se que PI corresponde à ação proporcional-integral, PD corresponde à ação proporcional-derivativo e que PID corresponde à ação proporcional-integral-derivativo, examine as afirmações a seguir sobre as ações de controle de processo PI, PD e PID.
I. Controle que elimina o erro de forma automática, gerando uma resposta transitória adequada pela ação proporcional.
II. Controle que combina a estabilidade com a eliminação de um erro em um único controlador; minimizando o sinal de erro pela ação proporcional, zerado pela ação integral e obtido em uma velocidade antecipada pela ação derivativa.
III. Controle que, na prática, não pode ser utilizado de forma isolada, mas quando combinado com outro tipo de controle, tem tendência de melhorar a estabilidade do sistema e reduzir o tempo de acomodação.
A sequência que apresenta corretamente as ações de controle é
Um controlador proporcional-derivativo (PD) é sensibilizado por um desvio que se manifesta com uma velocidade de 20%/min.
Considerando VP > SV, ação direta; Kp =2; KD=0, 20 min e So= 45%, qual a saída do controlador 15 segundos após o início do desvio?
Associe as duas colunas relacionando campo elemento de controle com as suas respectivas definições.
Elementos de Controle
(1) Variável Controlada
(2) Variável Manipulada
(3) Sistema
(4) Distúrbios
(5) Controle com realimentação
Definições
( ) É a grandeza ou a condição modificada pelo controlador, de modo que afete o valor da variável controlada.
( ) É um sinal que tende a afetar de maneira adversa o valor da variável de saída de um sistema.
( ) É a grandeza ou condição que é medida.
( ) É a combinação de componentes que agem em conjunto para atingir um determinado objetivo.
( ) É uma operação que, na presença de distúrbios, tem como objetivo diminuir a diferença entre uma entrada pré-definida e a saída de um sistema.
A sequência correta dessa associação é
Microprocessadores e computadores estão cada vez mais presentes no dia a dia de muitas pessoas. A esse respeito, avalie as afirmações a seguir.
I. Microprocessador é um circuito digital sequencial projetado para obedecer uma sequência de instruções denominada programa.
II. O microprocessador se conecta à memória através de um grupo de linhas denominado barramento.
III. Arquiteturas Superescalares são constituídas de múltiplos processadores, com execução de instruções em pipelines sequenciais, com memória cache independente.
IV. Os computadores contém cinco unidades essenciais, as quais sejam unidade lógica e aritmética, unidade memória, unidade de controle, unidade de entrada e unidade de saída.
Acerca de microprocessadores e computadores apenas está correto o que afirma em
Onde cada um dos ganhos K1, K2 e K3, representam, respectivamente, os ganhos das ações que são ajustados independentemente. O primeiro método de Ziegler e Nichols, desenvolvido em 1942, denominado de Sensibilidade Limite, foi uma forma de sintonizar o controlador PID à planta que se deseja controlar. Segundo esse método, ajustam-se os ganhos até que se tenha uma oscilação contínua em malha fechada. Que ajuste é esse?
Na análise e síntese de controladores e compensadores, leia as sentenças abaixo, asociando a coluna da esquerda com a direita e assinale a alternativa que apresenta a sequência correta.
I. PI – Controlador Proporcional Integral
II. PD - Controlador Proporcional Derivativo
III. PID – Controlador Proporcional Integral Derivativo
( ) O efeito desestabilizador é contrabalançado pela ação derivativa que tende a aumentar a estabilidade relativa do sistema ao mesmo tempo em que torna a resposta do sistema mais rápida devido ao seu efeito antecipatório.
( ) A ação integral é em geral utilizada em conjunto com a ação proporcional constituindo-se este controlador.
( ) Nesse caso, o sinal de controle a ser aplicado é proporcional a
uma predição da saída do processo.