Questões de Concurso
Sobre análise e controle de sistemas em engenharia de automação
Foram encontradas 85 questões
Observe o diagrama a seguir.

Em relação ao diagrama de circuito mostrado acima, em que u é a tensão de entrada e y a de saída, assinale V (verdadeiro) ou F (falso) nas afirmativas seguintes.
(__) Se a relação entre os resistores for R2 > R1, o sinal de entrada é amplificado na saída.
(__) A configuração é de circuito tipo inversor.
(__) O ganho desse sistema é - R2 / R1.
A sequência correta é
(__) É como um computador pessoal, PC, podendo-se usar sistema operacional baseado em Windows ou Linux, como o Ubuntu.
(__) É equipado com interfaces de entrada e saída especiais para a conexão de sensores e atuadores industriais.
(__) Por ser um dispositivo digital, não é capaz de processar sinais analógicos.
(__) Para controlar processos industriais, o CLP requer um grande número de relés para a realização de comparações e análises lógicas.
(__) Os programas ou softwares de controle gravados em um CLP devem ser regravados no caso de o dispositivo ter permanecido desligado por vários dias.
A sequência correta é
Observe a seguinte equação.

Para o sistema dinâmico mostrado na equação acima, assinale a alternativa que representa uma
realização de estado válida para quando o vetor de estado é definido como: 

A função de transferência correta é

Com base no diagrama da figura, a margem de ganho e a margem de fase são, respectivamente:
Observe a equação abaixo.

Em relação ao sistema dinâmico mostrado na equação, assinale V (verdadeiro) ou F (falso) nas afirmativas a seguir.
(__) É assintoticamente estável.
(__) Sua resposta ao degrau é sobreamortecida.
(__) É de fase mínima.
(__) Não é causal.
A sequência correta é
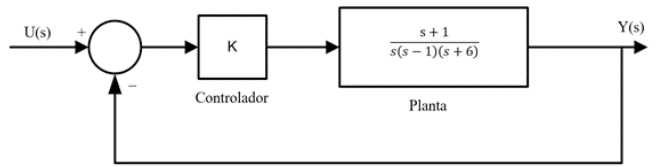
O diagrama de blocos a seguir representa uma planta de um motor de corrente contínua. Deseja-se
incluir um controlador que, ao adicionar um ganho, garante a estabilidade do sistema em malha fechada.
Determine a faixa de valores de ganho K, para que o sistema realimentado seja estável.
Fonte: IFSP, 2024
Um engenheiro de automação está desenvolvendo um sistema de controle para ajustar a temperatura de um forno industrial. Devido à complexidade das variações térmicas e às incertezas do processo, foi decidido utilizar um controlador fuzzy para otimizar o desempenho do sistema. Além disso, o engenheiro quer integrar técnicas de aprendizado de máquina para que o controlador possa se adaptar dinamicamente às condições do forno.
Com base nessa situação, qual das opções abaixo descreve corretamente uma vantagem da utilização de um controlador fuzzy adaptativo em comparação a um controlador fuzzy clássico?
Julgue o item seguinte, a respeito de elementos finais de controle e seus acessórios.
Em um processo industrial, elementos finais de controle são
utilizados na regulação do fluxo de fluidos de modo a se
manter variáveis como pressão, temperatura, fluxo, entre
outras, dentro de limites desejados.
Considere A uma matriz quadrada ortogonal qualquer não nula.
Com relação a essa matriz, observa-se que
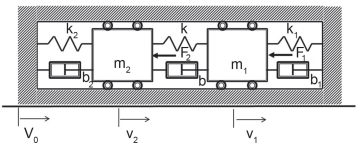
A matriz de amortecimento desse sistema é dada por