Questões de Concurso
Sobre análise e controle de sistemas em engenharia de automação
Foram encontradas 85 questões
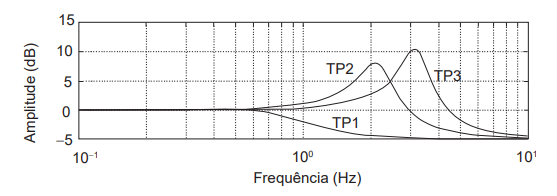
Considere que esse sistema será utilizado para medir sinais de pressão de pequena amplitude, com frequência em torno de 2 Hz.
Nesse caso, qual transdutor deverá ser utilizado?
Um técnico em instrumentação está orientando um estagiário. Durante a análise de um sinal de baixa frequência sobreposto com um ruído de alta frequência, o técnico questiona o estagiário sobre como poderia calcular a relação sinal/ruído (SNR) daquela medição. O estagiário responde que a SNR é uma relação entre as potências do sinal de baixa e de alta frequências que estão envolvidos no sinal medido.
Desse modo, para calcular a SNR da medição, o estagiário deve indicar a seguinte expressão matemática:
Dado
Vrms e VRrms são os valores RMS do sinal e do ruído
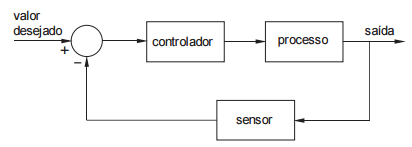
Considere o diagrama de blocos da figura a seguir.
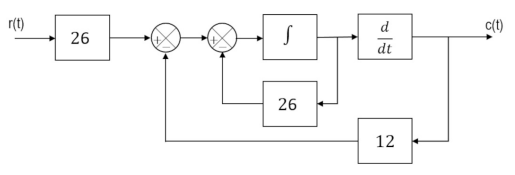
A função de transferência C(s) / R(s) do sistema representado por esse diagrama é dada por:
Assinale a alternativa que contém a função de transferência do sistema.

Sabendo que x02 representa uma chave que ativa o desligamento de emergência da carga conectada na saída Q01 e interpretando o programa ilustrado acima, pode-se afirmar que a bobina virtual é utilizada nesse caso para:
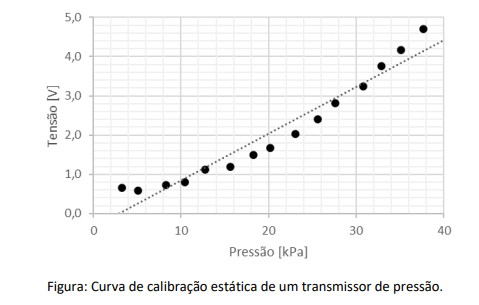
Com base na curva de calibração apresentada, é possível afirmar que:
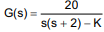 .
Para que esse sistema seja estável, o valor de K deverá ser:
.
Para que esse sistema seja estável, o valor de K deverá ser: Observe a figura a seguir:
Para o sistema representado na figura, a função de transferência de malha fechada C(s)/R(s) é
Considere as afirmações a seguir, sobre um sistema de controle de processo por malha fechada:
I – O sinal de saída referente a um dado processo é mensurado e comparado com o sinal de entrada, possibilitando, assim, um ajuste do controle, tornando o processo mais estável.
II – O controle de processo por malha fechada não depende do sinal de saída do processo.
III – O sinal de entrada é comparado com um valor de referência, aumentando, assim, a estabilidade do sistema.
Está correto o que se afirma em
I. Sua estabilidade global em relação a uma postura de equilíbrio é provada através do método de Lyapunov.
II. A técnica pode ser empregada para controle tanto no espaço das juntas quanto no espaço operacional.
III. Ela é uma técnica de controle centralizado, que considera o manipulador como um sistema de múltiplas entradas e múltiplas saídas, dinamicamente acoplado.
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):
Nesse sistema,
Os sistemas digitais de controle distribuídos (SDCD) NÃO
Uma malha de controle de um processo é constituída de diversos elementos, os quais podem ser classificados segundo sua função na malha.
Assim, o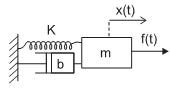
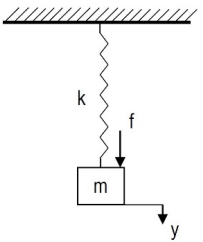
Utilizando as grandezas que aparecem na figura, e considerando que o termo forçante f(t) é a entrada, e a posição da massa x(t) é a saída, a função de transferência do sistema mecânico G(s)=x(s)/F(s) é igual a