Questões de Concurso
Sobre análise e controle de sistemas em engenharia de automação
Foram encontradas 77 questões
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192348
Engenharia de Automação
Texto associado
Considere o enunciado para responder a questão a seguir.

O diagrama em blocos da figura acima mostra uma confi-
guração em malha fechada. Sabe-se que
 e K é uma constante positiva.
e K é uma constante positiva.
O diagrama em blocos da figura acima mostra uma confi-
guração em malha fechada. Sabe-se que
e K é uma constante positiva.
A Função de Transferência que relaciona Y(s) com R(s) é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192347
Engenharia de Automação
Costuma-se aproximar a variável complexa z, usada em sistemas discretos (digitais), pela variável também complexa w para sistemas contínuos, através da relação de transformação  onde T (real positivo) é o período de amostragem usado na discretização do sinal contínuo.
onde T (real positivo) é o período de amostragem usado na discretização do sinal contínuo.
Sabe-se que a região de estabilidade para sistemas contínuos é o SPE, ou seja, o Semiplano da Esquerda do plano complexo da variável w, que pode ser definida por Re[w] < 0.
O lugar geométrico, no plano da variável z, dos pontos em que Re[w] < 0, é a região interior ao círculo de raio igual a (A) 1 e centro na origem
onde T (real positivo) é o período de amostragem usado na discretização do sinal contínuo.Sabe-se que a região de estabilidade para sistemas contínuos é o SPE, ou seja, o Semiplano da Esquerda do plano complexo da variável w, que pode ser definida por Re[w] < 0.
O lugar geométrico, no plano da variável z, dos pontos em que Re[w] < 0, é a região interior ao círculo de raio igual a (A) 1 e centro na origem
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192346
Engenharia de Automação
A famosa sequência de Fibonacci pode ser definida como o sinal x(n), discreto, causal e infinito, cujas primeiras amostras são

A sua lei de formação para pode ser expressa como
pode ser expressa como 
Aplicando a Transformada Z no sinal x(n), resulta a expressão
A sua lei de formação para
pode ser expressa como Aplicando a Transformada Z no sinal x(n), resulta a expressão
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192340
Engenharia de Automação
Um sinal v(t) é expresso, no domínio de Laplace, por
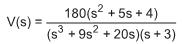
No domínio do tempo, quando t tende para infinito, o sinal v(t) tende para um valor estacionário, constante e igual a
No domínio do tempo, quando t tende para infinito, o sinal v(t) tende para um valor estacionário, constante e igual a
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192313
Engenharia de Automação

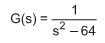
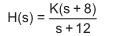
Considere o sistema de controle configurado na figura acima, onde a planta G(s) é INSTÁVEL, e deseja-se estabilizá-la e controlá-la com ajuda de um compensador do tipo H(s). Usa-se a técnica de cancelamento de polos da planta para reduzir a ordem do sistema. O engenheiro projetista achou, em seu cálculo, o ganho K = 125. Assim, os polos do sistema em malha fechada estarão posicionados em
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192308
Engenharia de Automação
Um ruído de alta frequência, em sistemas de monitoramento ou controle, que corrompe um sinal, pode ser atenuado por um filtro
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192307
Engenharia de Automação
A função de transferência no domínio de Laplace de um sistema linear é dada por onde Y(s) é a variável de saída e R(s), a variável de entrada. Nos três itens a seguir, considere as condições iniciais NULAS.
onde Y(s) é a variável de saída e R(s), a variável de entrada. Nos três itens a seguir, considere as condições iniciais NULAS.
O valor inicial, em t = 0, do sinal de saída desse sistema, quando se aplica um impulso unitário na entrada, é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192304
Engenharia de Automação
A função de transferência no domínio de Laplace de um
sistema linear é dada por onde Y(s) é a variável de saída e R(s), a variável de entrada. Nos três itens a seguir, considere as condições iniciais NULAS.
O valor da resposta em regime permanente desse sistema,
para uma entrada tipo degrau unitário, é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192303
Engenharia de Automação
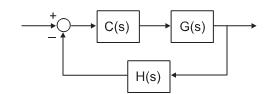
A Função de Transferência de Malha Aberta (FTMA) da estrutura de controle mostrada na figura acima é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192301
Engenharia de Automação
Em um sistema de controle em malha fechada, a planta é o elemento que possui a(s) variável(eis)
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobras - Técnico de Operação Júnior |
Q182312
Engenharia de Automação
Com relação aos sistemas de controle de processo por malha fechada, considere as afirmativas a seguir.
I – Nos sistemas de controle de processo por malha fechada, os sinais de saída não exercem nenhuma interferência sobre o controle do processo.
II – Os sinais de saída provenientes de um determinado processo são utilizados para ajustar o controle, tornando os processos mais estáveis.
III – Nos sistemas de controle por malha fechada, a estabilidade do sistema é uma variável irrelevante do processo.
Está correto o que se afirma em
I – Nos sistemas de controle de processo por malha fechada, os sinais de saída não exercem nenhuma interferência sobre o controle do processo.
II – Os sinais de saída provenientes de um determinado processo são utilizados para ajustar o controle, tornando os processos mais estáveis.
III – Nos sistemas de controle por malha fechada, a estabilidade do sistema é uma variável irrelevante do processo.
Está correto o que se afirma em
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador Tecnologista - Metrologia em Informática |
Q267626
Engenharia de Automação
Um sistema linear cuja função de transferência seja dada por 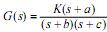 , em que K, a, b e c são números reais, será estável se
, em que K, a, b e c são números reais, será estável se
, em que K, a, b e c são números reais, será estável se
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador Tecnologista - Metrologia em Informática |
Q267624
Engenharia de Automação
Em sistemas dinâmicos lineares e contínuos, a resposta ao impulso, também denominada função de ponderação, corresponde a uma forma de representação do sistema no domínio do tempo. Conhecendo-se a resposta impulsiva, a resposta do sistema a outros tipos de excitação pode ser corretamente obtida
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2010 - Petrobras - Engenheiro de Equipamento Júnior - Mecânica - Biocombustível |
Q187542
Engenharia de Automação
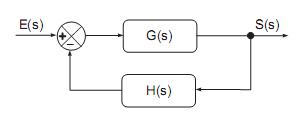
O controle de um processo é representado pelo diagrama de blocos acima, onde E(s) é a entrada, S(s) é a saída, G(s) é a função de transferência do processo a ser controlado e H(s) é a função de transferência do controlador. Considerando-se uma realimentação unitária, a função de transferência do sistema com o controlador, FT = S(s)/E(s), é expressa por
Ano: 2008
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2008 - Transpetro - Engenheiro Júnior - Automação |
Q113267
Engenharia de Automação
Um sistema dinâmico em malha fechada pode ser modelado sob a forma de espaço de estado através das seguintes equações:
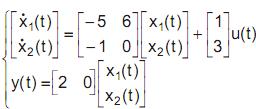
As posições dos pólos no plano s da função de transferência deste sistema são
As posições dos pólos no plano s da função de transferência deste sistema são
Ano: 2008
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2008 - Transpetro - Engenheiro Júnior - Automação |
Q113266
Engenharia de Automação
Um determinado sistema físico pode ser modelado através da seguinte equação diferencial ordinária:

onde u(t) e y(t) representam, respectivamente, os sinais de entrada e de saída do sistema. A função de transferência G(s) = deste sistema é
deste sistema é
onde u(t) e y(t) representam, respectivamente, os sinais de entrada e de saída do sistema. A função de transferência G(s) =
deste sistema é
Ano: 2008
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2008 - Transpetro - Engenheiro Júnior - Automação |
Q113261
Engenharia de Automação

Quando uma entrada r(t) do tipo degrau for aplicada, qual o valor do ganho M para que o erro de estado estacionário seja NULO?