Questões de Concurso
Sobre análise e controle de sistemas em engenharia de automação
Foram encontradas 77 questões
Considere o modelo de estado
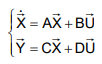
no qual dim [A] = n × n, dim [B] = n × m, dim [C] = r × n e dim [D] = r × m.
A condição de observabilidade completa é garantida se e
somente se o posto da matriz de observabilidade é igual
a(ao)
Considere a função de transferência de malha aberta na qual |z|>|p|
k(s + z) / s(s + p)(s2 + 2ps + p2 + 2p)
Considere a construção de uma malha fechada com esse sistema no seu ramo direto e realimentação unitária, e que k1 e k3 são ganhos para os quais a malha fechada possui polos reais iguais, e k2 é o ganho no qual a malha fechada passa a ser instável.
Considerando-se k1
< k2
< k3
, conclui-se que modos superamortecidos estarão presentes na resposta dinâmica
estável dessa malha fechada para
O sistema de malha fechada descrito acima é
Considere o Lugar Geométrico das Raizes (LGR) da Figura abaixo.

Considerando-se as informações acima, verifica-se que
K = 3 é o ganho
Uma das possíveis inconsistências que devem ser evitadas são as malhas
Considere que o circuito abaixo é formado por resistores.
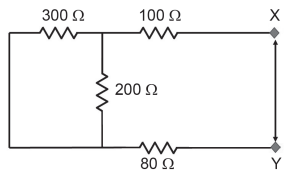
O valor, em Ω, da resistência equivalente vista entre os
terminais X e Y é
Entradas:
X0 = Botão retentivo de 2 posições, sendo, na posição 1, automático; na posição 2, manual.
X1 = Sensor S1
X2 = Sensor S2
X3 = Botão liga pulsante
X4 = Botão desliga pulsante
Nota: O botão retentivo na entrada X0 , na posição 1 (automático) emite um sinal na entrada. Se na posição 2 (manual) não emite sinal na entrada.
Saída: Y0 = Bomba d’água
O programa em Ladder instalado no CLP é o seguinte:
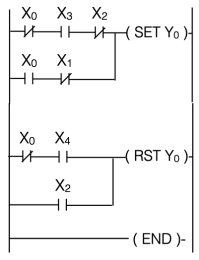
Analisando-se o programa, constata-se que o sistema em
Aumentando-se o ganho proporcional do PI, o amortecimento da malha fechada
Considere o sistema de controle em malha fechada, dado pelo diagrama de blocos a seguir.
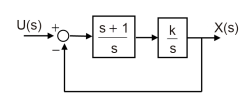
A função de transferência de malha fechada  é
é
Considere uma função de transferência de um controlador PID, realizável por um circuito ou sistema analógico, na forma de polos e zeros finitos dependentes dos ganhos proporcional, integral e derivativo.
Essa função é dada por
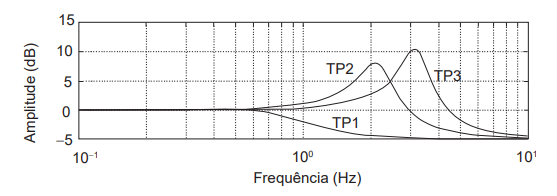
Considere que esse sistema será utilizado para medir sinais de pressão de pequena amplitude, com frequência em torno de 2 Hz.
Nesse caso, qual transdutor deverá ser utilizado?
Um técnico em instrumentação está orientando um estagiário. Durante a análise de um sinal de baixa frequência sobreposto com um ruído de alta frequência, o técnico questiona o estagiário sobre como poderia calcular a relação sinal/ruído (SNR) daquela medição. O estagiário responde que a SNR é uma relação entre as potências do sinal de baixa e de alta frequências que estão envolvidos no sinal medido.
Desse modo, para calcular a SNR da medição, o estagiário deve indicar a seguinte expressão matemática:
Dado
Vrms e VRrms são os valores RMS do sinal e do ruído
Considere o diagrama de blocos da figura a seguir.
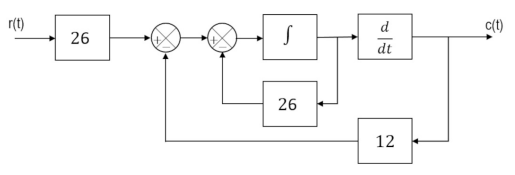
A função de transferência C(s) / R(s) do sistema representado por esse diagrama é dada por:
Assinale a alternativa que contém a função de transferência do sistema.

Sabendo que x02 representa uma chave que ativa o desligamento de emergência da carga conectada na saída Q01 e interpretando o programa ilustrado acima, pode-se afirmar que a bobina virtual é utilizada nesse caso para:
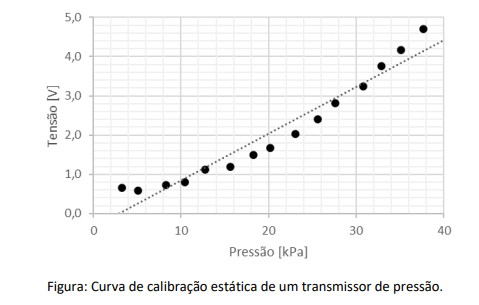
Com base na curva de calibração apresentada, é possível afirmar que: