Questões de Concurso Sobre engenharia de automação
Foram encontradas 350 questões
Considere o Lugar Geométrico das Raizes (LGR) da Figura abaixo.

Considerando-se as informações acima, verifica-se que
K = 3 é o ganho
Considere o diagrama de blocos de um sistema de controle.
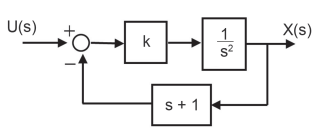
O fator de amortecimento da malha fechada desse sistema é
Uma das possíveis inconsistências que devem ser evitadas são as malhas
Na Figura abaixo, representa-se o controle exercido na velocidade de um motor CC.
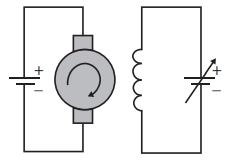
De acordo com a Figura, está sendo empregado o controle pelo(a)
Nesse cenário, deseja-se que o microcontrolador acesse um byte dessa memória.
Utilizando-se a notação 0x, qual é o maior endereço, em hexadecimal, para o microcontrolador realizar esse acesso?
Dado 1 kB = 1 kilobyte = 1024 bytes
Considere o trecho de código na linguagem C, descrito abaixo.
int Teste[5] = {4,2,10,4,5};
int SomaQ = 0;
int i;
for (i=0;i<5;i++) {
"código a ser incluído aqui"
} /* for */
Qual código deve ser incluído na linha indicada entre
aspas (" ") para que a variável SomaQ assuma o valor
da soma dos quadrados dos números contidos no vetor
Teste quando terminar o loop?
Considere que o circuito abaixo é formado por resistores.
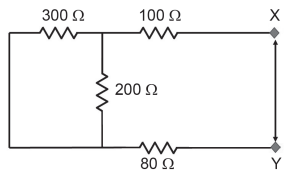
O valor, em Ω, da resistência equivalente vista entre os
terminais X e Y é
Na Figura abaixo está representado um circuito RLC em série.
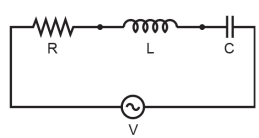
Considerado-se todos os componentes desse circuito
como ideais — o Resistor (R), o indutor (L), o capacitor
(C), e a fonte de tensão (V) — constata-se que
Um multímetro mediu 21 V como o valor Root Mean Square (RMS) da tensão de um sinal senoidal ideal.
Qual é o valor, em volts, da tensão pico a pico desse sinal senoidal?
Dado
√2 = 1,4
√3 = 1,7
Considerando-se a recomendação do fabricante, a interpolação mencionada acima e o uso de um osciloscópio digital com capacidade de 1 GSa/s (109 amostras por segundo), qual será a frequência máxima de um sinal senoidal ideal que poderá ser medida?
Pode-se usar, por exemplo, o modo Fast PWM com o TIMER 2, de 8 bits, para gerar formas de onda com diferentes duty cycles, ou ciclos de trabalho em português. Considere que a fórmula do ciclo de trabalho C é:
C = (REG+1)/256, onde C = ciclo de trabalho e REG é o valor colocado no registro OCR2A de 8 bits (de 0 a 255 em decimal). O valor de 0 equivale a ciclo de trabalho de 0% enquanto o valor de 1 equivale ao ciclo de trabalho de 100%.
Para um sistema de controle de iluminação, atribuiu-se o valor REG = 63, usando uma das saídas do TIMER2.
Qual é o valor do ciclo de trabalho nessa saída?
Para se ter tensão de saída de 5 V, é escrito no registro o valor em notação binária 11111111, e, para a tensão de saída de 0 V, o valor 00000000.
Considerando-se que o conversor D/A tenha funcionamento linear, qual dos valores abaixo deverá ser escrito no registro acima, em notação binária, para gerar uma tensão de saída próxima a 1,25 V?
Considerando-se que o carro está desligado, o alarme eletrônico está ativado e consumindo de forma constante 100 mA, em quantos dias, aproximadamente, a energia da bateria será consumida?
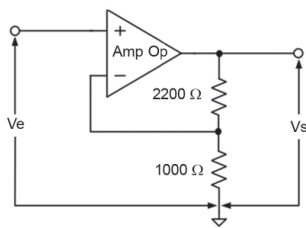
Qual será o valor, em volts, da tensão de saída Vs se for aplicada a tensão de entrada Ve no valor de 3 V?
Uma dessas ferramentas destina-se ao controle do movimento e da velocidade de seus eixos ao longo de um processamento de uma peça.
A ferramenta citada é:
A seguinte caracterização NÃO descreve adequadamente um CLP:
A seguinte caracterização NÃO descreve adequadamente um sistema supervisório: