Questões de Concurso Sobre engenharia de automação
Foram encontradas 350 questões
Q2182394
Engenharia de Automação
Considere o diagrama de blocos da figura a seguir.
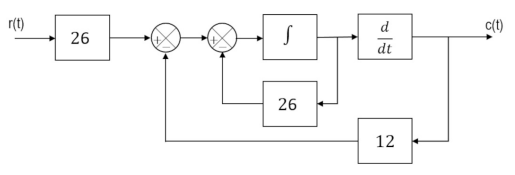
A função de transferência C(s) / R(s) do sistema representado por esse diagrama é dada por:
Q2182393
Engenharia de Automação
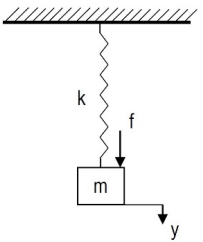
Considere o sistema mecânico da figura ao lado. O deslocamento vertical y da
massa m é a saída do sistema. Esse deslocamento é medido a partir da posição
de equilíbrio do sistema, ou seja, kδ = mg, em que δ é a deflexão estática da
mola (quando a massa é pendurada na mola), k é a constante de elasticidade da
mola, e g é a aceleração da gravidade. O sistema encontra-se em repouso
para t < 0. Em t = 0, uma força externa f é aplicada ao sistema.
Assinale a alternativa que contém a função de transferência do sistema.
Assinale a alternativa que contém a função de transferência do sistema.
Q2182392
Engenharia de Automação
Controladores PID possuem ação proporcional, integral e derivativa. São frequentemente utilizados em sistemas de
automação de processos industriais. Em essência, controladores industriais comparam uma variável de saída em
relação a uma referência previamente definida. Diferenças entre elas alimentam o controlador, que busca igualá-las.
No contexto de controladores industriais PID, é correto afirmar:
Q2182391
Engenharia de Automação
Em relação às redes industriais PROFIBUS DP e PROFINET, pode-se afirmar que:
Q2182390
Engenharia de Automação
Automação de sistemas industriais pode ser obtida com a utilização de dispositivos para acionamentos
eletromecânicos.
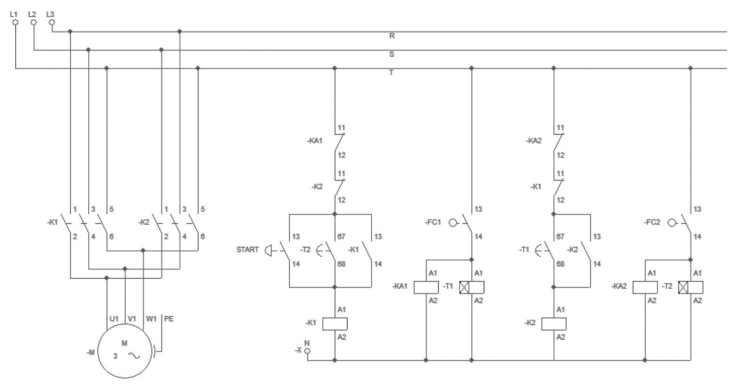
Interpretando os diagramas de comando e força acima, pode-se entender que o sistema foi concebido para:
Interpretando os diagramas de comando e força acima, pode-se entender que o sistema foi concebido para:
Q2182389
Engenharia de Automação
Bobinas virtuais, também conhecidas como marcadores, são um importante recurso disponível em diversos
controladores lógicos programáveis. O diagrama Ladder a seguir ilustra a aplicação de uma delas, identificada
como M01. Neste diagrama, letras minúsculas e maiúsculas são utilizadas para diferenciar contatos normalmente
abertos de contatos normalmente fechados. 
Sabendo que x02 representa uma chave que ativa o desligamento de emergência da carga conectada na saída Q01 e interpretando o programa ilustrado acima, pode-se afirmar que a bobina virtual é utilizada nesse caso para:
Sabendo que x02 representa uma chave que ativa o desligamento de emergência da carga conectada na saída Q01 e interpretando o programa ilustrado acima, pode-se afirmar que a bobina virtual é utilizada nesse caso para:
Ano: 2023
Banca:
UFPR
Órgão:
IF-PR
Prova:
UFPR - 2023 - IF-PR - Analista em Tecnologia da Informação |
Q2182227
Engenharia de Automação
Quem vai comprar uma placa Arduino geralmente se sente um pouco perdido devido ao grande número de tipos de
Arduino e funções disponíveis. Nesse sentido, é importante saber que NÃO corresponde a essa categoria de
plataforma a placa Arduino:
Ano: 2023
Banca:
IF-MG
Órgão:
IF-MG
Prova:
IF-MG - 2023 - IF-MG - Professor EBTT Área/Disciplina: Controle e Automação |
Q2171377
Engenharia de Automação
Um manipulador antropomórfico com 6 juntas revolutas está sendo usado para mover peças em uma linha de
produção automotiva. É possível afirmar que o Espaço de Trabalho do manipulador tem dimensão:
Ano: 2023
Banca:
IF-MG
Órgão:
IF-MG
Prova:
IF-MG - 2023 - IF-MG - Professor EBTT Área/Disciplina: Controle e Automação |
Q2171376
Engenharia de Automação
Considere um robô móvel não-holonômico que se move sobre um plano horizontal sem obstáculos. É correto
dizer que o robô:
Ano: 2023
Banca:
IF-MG
Órgão:
IF-MG
Prova:
IF-MG - 2023 - IF-MG - Professor EBTT Área/Disciplina: Controle e Automação |
Q2171375
Engenharia de Automação
Considere as afirmativas abaixo:
I – Além de apresentar um torque elevado (quando comparado a outras situações), a partida direta do motor de indução trifásico é o método mais barato.
II – Por ter acesso às correntes de linha do motor, pelo circuito de força, o relé térmico exibe a vantagem de proteger o motor contra curto-circuito.
III - A redução da corrente para 1/3 é a vantagem da partida estrela-triângulo em comparação com a partida direta.
IV- Porque a redução da corrente é feita via transformador, a partida compensadora reduz a corrente de entrada sem reduzir o torque do motor.
V – A aceleração do motor com a partida via softstarter exibe muitos trancos e golpes mecânicos porque a forma de onda da tensão de alimentação não é senoidal.
Das afirmativas é correto apenas o que se afirma em:
I – Além de apresentar um torque elevado (quando comparado a outras situações), a partida direta do motor de indução trifásico é o método mais barato.
II – Por ter acesso às correntes de linha do motor, pelo circuito de força, o relé térmico exibe a vantagem de proteger o motor contra curto-circuito.
III - A redução da corrente para 1/3 é a vantagem da partida estrela-triângulo em comparação com a partida direta.
IV- Porque a redução da corrente é feita via transformador, a partida compensadora reduz a corrente de entrada sem reduzir o torque do motor.
V – A aceleração do motor com a partida via softstarter exibe muitos trancos e golpes mecânicos porque a forma de onda da tensão de alimentação não é senoidal.
Das afirmativas é correto apenas o que se afirma em:
Ano: 2023
Banca:
IF-MG
Órgão:
IF-MG
Prova:
IF-MG - 2023 - IF-MG - Professor EBTT Área/Disciplina: Controle e Automação |
Q2171370
Engenharia de Automação
Sobre sistemas supervisórios é incorreto afirmar que:
Ano: 2023
Banca:
IF-MG
Órgão:
IF-MG
Prova:
IF-MG - 2023 - IF-MG - Professor EBTT Área/Disciplina: Controle e Automação |
Q2171365
Engenharia de Automação
Sistemas supervisórios são sistemas informatizados que visam atender às necessidades de processos industriais.
Assinale, dentre as afirmativas abaixo, aquela que corretamente descreve funcionalidades e características de sistemas supervisórios.
Assinale, dentre as afirmativas abaixo, aquela que corretamente descreve funcionalidades e características de sistemas supervisórios.
Ano: 2023
Banca:
IF-MG
Órgão:
IF-MG
Prova:
IF-MG - 2023 - IF-MG - Professor EBTT Área/Disciplina: Controle e Automação |
Q2171358
Engenharia de Automação
A curva de calibração estática de um transmissor de pressão foi obtida a partir da execução de um procedimento
adequado, com um padrão de trabalho rastreável. Os pontos obtidos e a respectiva reta de calibração são
apresentados na figura a seguir.
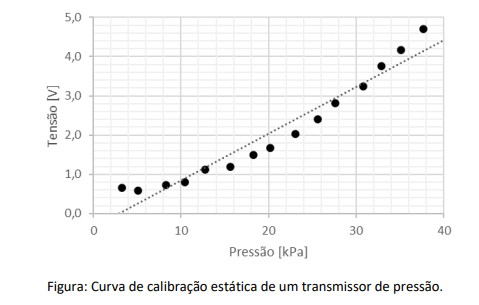
Com base na curva de calibração apresentada, é possível afirmar que:
Com base na curva de calibração apresentada, é possível afirmar que:
Ano: 2022
Banca:
FEPESE
Órgão:
Prefeitura de Balneário Camboriú - SC
Prova:
FEPESE - 2022 - Prefeitura de Balneário Camboriú - SC - Professor de Inovação e Tecnologia - Edital nº 005 |
Q2401086
Engenharia de Automação
Qual o paradigma predominante no que diz respeito à prática de ensino utilizando a robótica?
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Petrobras
Prova:
CESPE / CEBRASPE - 2022 - Petrobras - Engenharia de Equipamentos – Eletrônica |
Q1894295
Engenharia de Automação
Julgue o item que se segue, a respeito de robótica.
A cinemática inversa procura analisar os incrementos de posição ao longo do tempo de cada um dos componentes do braço de um robô.
A cinemática inversa procura analisar os incrementos de posição ao longo do tempo de cada um dos componentes do braço de um robô.
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Petrobras
Prova:
CESPE / CEBRASPE - 2022 - Petrobras - Engenharia de Equipamentos – Eletrônica |
Q1894294
Engenharia de Automação
Julgue o item que se segue, a respeito de robótica.
A transformação que descreve a relação entre a mão de um manipulador robótico e o referencial de origem também descreve as relações entre os elos intermediários do braço de um robô.
A transformação que descreve a relação entre a mão de um manipulador robótico e o referencial de origem também descreve as relações entre os elos intermediários do braço de um robô.
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Petrobras
Prova:
CESPE / CEBRASPE - 2022 - Petrobras - Engenharia de Equipamentos – Eletrônica |
Q1894293
Engenharia de Automação
Julgue o item que se segue, a respeito de robótica.
Os atuadores elétricos utilizados para movimentar as juntas de um robô possuem o inconveniente de gerar arcos elétricos.
Os atuadores elétricos utilizados para movimentar as juntas de um robô possuem o inconveniente de gerar arcos elétricos.
Ano: 2019
Banca:
ADM&TEC
Órgão:
Prefeitura de Rio Largo - AL
Prova:
ADM&TEC - 2019 - Prefeitura de Rio Largo - AL - Eletricista |
Q1712202
Engenharia de Automação
Leia as afirmativas a seguir:
I. A empatia é a atitude do entendimento, da interação e da expressão facial e corporal.
II. Um sistema de automação predial não permite controlar e monitorar o consumo energético da edificação.
III. O desempenho do produto é um fator que não deve ser considerado no momento da escolha dos materiais elétricos.
Marque a alternativa CORRETA:
I. A empatia é a atitude do entendimento, da interação e da expressão facial e corporal.
II. Um sistema de automação predial não permite controlar e monitorar o consumo energético da edificação.
III. O desempenho do produto é um fator que não deve ser considerado no momento da escolha dos materiais elétricos.
Marque a alternativa CORRETA:
Q1189390
Engenharia de Automação
As máquinas elétricas rotativas podem funcionar como gerador e como motor. A respeito de máquinas elétricas responda:
Ano: 2018
Banca:
FUNDEP (Gestão de Concursos)
Órgão:
INB
Prova:
FUNDEP (Gestão de Concursos) - 2018 - INB - Engenheiro de Automação e Controle |
Q1103247
Engenharia de Automação
Considere um sistema cuja função de transferência seja
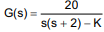 .
Para que esse sistema seja estável, o valor de K deverá ser:
.
Para que esse sistema seja estável, o valor de K deverá ser:
.
Para que esse sistema seja estável, o valor de K deverá ser: