Questões de Concurso Sobre engenharia de automação
Foram encontradas 329 questões
Ano: 2023
Banca:
IF-SP
Órgão:
IF-SP
Prova:
IF-SP - 2023 - IF-SP - Técnico de Laboratório/Área: Mecatrônica |
Q2287674
Engenharia de Automação
Em uma fábrica de eletrônicos, um robô industrial é utilizado para a montagem de placas de
circuito. A velocidade e a precisão do robô são essenciais para garantir a qualidade do produto e otimizar a produção. Nesse contexto, o acionamento
por servomecanismo é fundamental.
O que diferencia um servomecanismo de outros tipos de acionamentos em robótica?
O que diferencia um servomecanismo de outros tipos de acionamentos em robótica?
Ano: 2023
Banca:
IF-SP
Órgão:
IF-SP
Prova:
IF-SP - 2023 - IF-SP - Técnico de Laboratório/Área: Mecatrônica |
Q2287669
Engenharia de Automação
Em uma indústria petroquímica, um tanque
de reação química é controlado por um sistema
PID. O controlador é responsável por manter o nível do líquido do tanque dentro de certos limites
pré-definidos. Um operador observou que, apesar
do nível do líquido se estabilizar corretamente no
ponto desejado, há uma oscilação persistente em
torno desse ponto.
Com base nessa observação, qual alteração no controlador PID poderia corrigir esse comportamento?
Com base nessa observação, qual alteração no controlador PID poderia corrigir esse comportamento?
Ano: 2023
Banca:
IF-SP
Órgão:
IF-SP
Prova:
IF-SP - 2023 - IF-SP - Técnico de Laboratório/Área: Mecatrônica |
Q2287653
Engenharia de Automação
Em um sistema de logística, um robô é utilizado para direcionar pacotes para diferentes destinos com base em um código de barras presente em
cada pacote. O robô funciona com uma máquina
de estados com quatro estados: S0, S1, S2 e S3,
que representam diferentes destinos. A lógica da
máquina de estados é:
• No estado S0: com entrada 1, vai para S1; com entrada 0, permanece em S0.
• No estado S1: com entrada 1, vai para S2; com entrada 0, volta para S0.
• No estado S2: com entrada 1, retorna para S1; com entrada 0, vai para S3.
• No estado S3: independente da entrada, retorna para S0.
Se o robô começa no estado S0 e recebe as entradas: 1, 1, 0, qual será o estado final?
• No estado S0: com entrada 1, vai para S1; com entrada 0, permanece em S0.
• No estado S1: com entrada 1, vai para S2; com entrada 0, volta para S0.
• No estado S2: com entrada 1, retorna para S1; com entrada 0, vai para S3.
• No estado S3: independente da entrada, retorna para S0.
Se o robô começa no estado S0 e recebe as entradas: 1, 1, 0, qual será o estado final?
Ano: 2023
Banca:
CESPE / CEBRASPE
Órgão:
DATAPREV
Prova:
CESPE / CEBRASPE - 2023 - DATAPREV - Analista de Tecnologia da Informação - Perfil: Sustentação Tecnológica |
Q2275537
Engenharia de Automação
Julgue o item subsequente, relativo aos conceitos de conformidade e automação de TI: Puppet, Ansible.
O Ansible é uma solução de software que permite controlar
um dispositivo, através de agentes nele instalados, a partir de
um local diferente, sendo que a comunicação entre o servidor
e o dispositivo ocorre por meio dos referidos agentes.
Ano: 2023
Banca:
FEPESE
Órgão:
Companhia Águas de Joinville
Prova:
FEPESE - 2023 - Companhia Águas de Joinville - Analista de Gestão - Automação |
Q2265170
Engenharia de Automação
Assinale a alternativa correta em relação às redes
industriais e suas características.
Q2182396
Engenharia de Automação
Qual é a função de um atuador em um robô?
Q2182395
Engenharia de Automação
Qual é a principal diferença entre um sistema SCADA e um sistema PIMS em um ambiente industrial?
Q2182394
Engenharia de Automação
Considere o diagrama de blocos da figura a seguir.
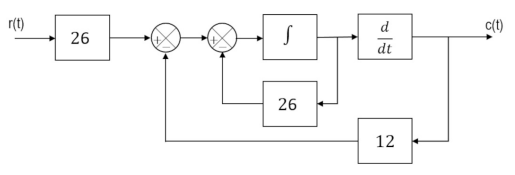
A função de transferência C(s) / R(s) do sistema representado por esse diagrama é dada por:
Q2182393
Engenharia de Automação
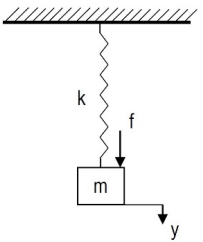
Considere o sistema mecânico da figura ao lado. O deslocamento vertical y da
massa m é a saída do sistema. Esse deslocamento é medido a partir da posição
de equilíbrio do sistema, ou seja, kδ = mg, em que δ é a deflexão estática da
mola (quando a massa é pendurada na mola), k é a constante de elasticidade da
mola, e g é a aceleração da gravidade. O sistema encontra-se em repouso
para t < 0. Em t = 0, uma força externa f é aplicada ao sistema.
Assinale a alternativa que contém a função de transferência do sistema.
Assinale a alternativa que contém a função de transferência do sistema.
Q2182392
Engenharia de Automação
Controladores PID possuem ação proporcional, integral e derivativa. São frequentemente utilizados em sistemas de
automação de processos industriais. Em essência, controladores industriais comparam uma variável de saída em
relação a uma referência previamente definida. Diferenças entre elas alimentam o controlador, que busca igualá-las.
No contexto de controladores industriais PID, é correto afirmar:
Q2182391
Engenharia de Automação
Em relação às redes industriais PROFIBUS DP e PROFINET, pode-se afirmar que:
Q2182390
Engenharia de Automação
Automação de sistemas industriais pode ser obtida com a utilização de dispositivos para acionamentos
eletromecânicos.
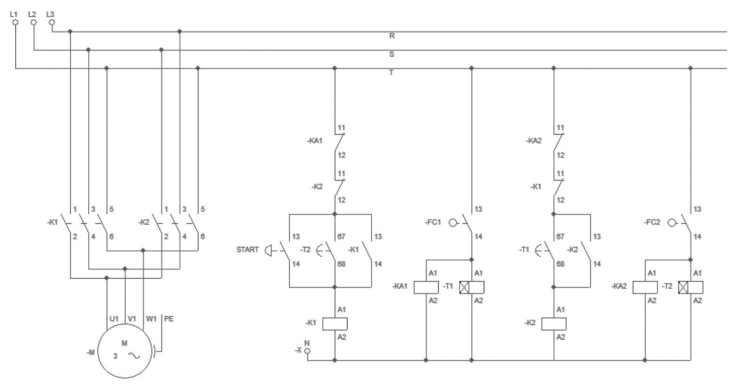
Interpretando os diagramas de comando e força acima, pode-se entender que o sistema foi concebido para:
Interpretando os diagramas de comando e força acima, pode-se entender que o sistema foi concebido para:
Q2182389
Engenharia de Automação
Bobinas virtuais, também conhecidas como marcadores, são um importante recurso disponível em diversos
controladores lógicos programáveis. O diagrama Ladder a seguir ilustra a aplicação de uma delas, identificada
como M01. Neste diagrama, letras minúsculas e maiúsculas são utilizadas para diferenciar contatos normalmente
abertos de contatos normalmente fechados. 
Sabendo que x02 representa uma chave que ativa o desligamento de emergência da carga conectada na saída Q01 e interpretando o programa ilustrado acima, pode-se afirmar que a bobina virtual é utilizada nesse caso para:
Sabendo que x02 representa uma chave que ativa o desligamento de emergência da carga conectada na saída Q01 e interpretando o programa ilustrado acima, pode-se afirmar que a bobina virtual é utilizada nesse caso para:
Ano: 2023
Banca:
UFPR
Órgão:
IF-PR
Prova:
UFPR - 2023 - IF-PR - Analista em Tecnologia da Informação |
Q2182227
Engenharia de Automação
Quem vai comprar uma placa Arduino geralmente se sente um pouco perdido devido ao grande número de tipos de
Arduino e funções disponíveis. Nesse sentido, é importante saber que NÃO corresponde a essa categoria de
plataforma a placa Arduino:
Ano: 2023
Banca:
IF-MG
Órgão:
IF-MG
Prova:
IF-MG - 2023 - IF-MG - Professor EBTT Área/Disciplina: Controle e Automação |
Q2171377
Engenharia de Automação
Um manipulador antropomórfico com 6 juntas revolutas está sendo usado para mover peças em uma linha de
produção automotiva. É possível afirmar que o Espaço de Trabalho do manipulador tem dimensão:
Ano: 2023
Banca:
IF-MG
Órgão:
IF-MG
Prova:
IF-MG - 2023 - IF-MG - Professor EBTT Área/Disciplina: Controle e Automação |
Q2171376
Engenharia de Automação
Considere um robô móvel não-holonômico que se move sobre um plano horizontal sem obstáculos. É correto
dizer que o robô:
Ano: 2023
Banca:
IF-MG
Órgão:
IF-MG
Prova:
IF-MG - 2023 - IF-MG - Professor EBTT Área/Disciplina: Controle e Automação |
Q2171375
Engenharia de Automação
Considere as afirmativas abaixo:
I – Além de apresentar um torque elevado (quando comparado a outras situações), a partida direta do motor de indução trifásico é o método mais barato.
II – Por ter acesso às correntes de linha do motor, pelo circuito de força, o relé térmico exibe a vantagem de proteger o motor contra curto-circuito.
III - A redução da corrente para 1/3 é a vantagem da partida estrela-triângulo em comparação com a partida direta.
IV- Porque a redução da corrente é feita via transformador, a partida compensadora reduz a corrente de entrada sem reduzir o torque do motor.
V – A aceleração do motor com a partida via softstarter exibe muitos trancos e golpes mecânicos porque a forma de onda da tensão de alimentação não é senoidal.
Das afirmativas é correto apenas o que se afirma em:
I – Além de apresentar um torque elevado (quando comparado a outras situações), a partida direta do motor de indução trifásico é o método mais barato.
II – Por ter acesso às correntes de linha do motor, pelo circuito de força, o relé térmico exibe a vantagem de proteger o motor contra curto-circuito.
III - A redução da corrente para 1/3 é a vantagem da partida estrela-triângulo em comparação com a partida direta.
IV- Porque a redução da corrente é feita via transformador, a partida compensadora reduz a corrente de entrada sem reduzir o torque do motor.
V – A aceleração do motor com a partida via softstarter exibe muitos trancos e golpes mecânicos porque a forma de onda da tensão de alimentação não é senoidal.
Das afirmativas é correto apenas o que se afirma em:
Ano: 2023
Banca:
IF-MG
Órgão:
IF-MG
Prova:
IF-MG - 2023 - IF-MG - Professor EBTT Área/Disciplina: Controle e Automação |
Q2171370
Engenharia de Automação
Sobre sistemas supervisórios é incorreto afirmar que:
Ano: 2023
Banca:
IF-MG
Órgão:
IF-MG
Prova:
IF-MG - 2023 - IF-MG - Professor EBTT Área/Disciplina: Controle e Automação |
Q2171365
Engenharia de Automação
Sistemas supervisórios são sistemas informatizados que visam atender às necessidades de processos industriais.
Assinale, dentre as afirmativas abaixo, aquela que corretamente descreve funcionalidades e características de sistemas supervisórios.
Assinale, dentre as afirmativas abaixo, aquela que corretamente descreve funcionalidades e características de sistemas supervisórios.
Ano: 2023
Banca:
IF-MG
Órgão:
IF-MG
Prova:
IF-MG - 2023 - IF-MG - Professor EBTT Área/Disciplina: Controle e Automação |
Q2171358
Engenharia de Automação
A curva de calibração estática de um transmissor de pressão foi obtida a partir da execução de um procedimento
adequado, com um padrão de trabalho rastreável. Os pontos obtidos e a respectiva reta de calibração são
apresentados na figura a seguir.
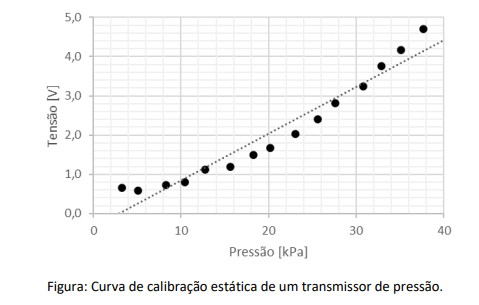
Com base na curva de calibração apresentada, é possível afirmar que:
Com base na curva de calibração apresentada, é possível afirmar que: