Questões de Concurso Sobre engenharia de automação
Foram encontradas 340 questões
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262983
Engenharia de Automação
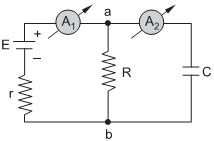
A análise de um projeto de automação indicou a presença do circuito ilustrado como elemento auxiliar, alimentado por corrente contínua.
Se a resistência R mede
 o amperímetro A1 indica 2A, a capacitância é de
o amperímetro A1 indica 2A, a capacitância é de  e o capacitor já se encontra totalmente carregado, a indicação no amperímetro A2 e a carga armazenada no capacitor são, respectivamente,
e o capacitor já se encontra totalmente carregado, a indicação no amperímetro A2 e a carga armazenada no capacitor são, respectivamente,
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262982
Engenharia de Automação
A programação de controladores de processos de automação em um ambiente industrial utiliza um sinal digital de 100 kHz de frequência aplicado à entrada do sistema abaixo.
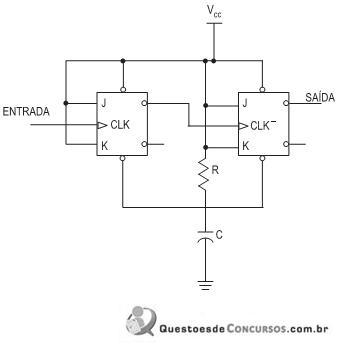
Nessas condições, a frequência do sinal de saída, em kHz, é
Nessas condições, a frequência do sinal de saída, em kHz, é
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262981
Engenharia de Automação
Com relação aos sistemas automatizados, observe as afirmações a seguir.
I - A linguagem verbal no desenvolvimento de projetos automatizados é muito indicada, pois pode gerar várias interpretações, enriquecendo a comunicação.
II - As representações gráficas não são as mais indicadas devido ao elevado grau de dificuldade em sua compreensão.
III - Uma das maiores dificuldades do desenvolvimento de Sistemas Automatizados é o fornecimento de informações de modo claro e conciso aos projetistas.
Está correto o que se afirma em
I - A linguagem verbal no desenvolvimento de projetos automatizados é muito indicada, pois pode gerar várias interpretações, enriquecendo a comunicação.
II - As representações gráficas não são as mais indicadas devido ao elevado grau de dificuldade em sua compreensão.
III - Uma das maiores dificuldades do desenvolvimento de Sistemas Automatizados é o fornecimento de informações de modo claro e conciso aos projetistas.
Está correto o que se afirma em
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262980
Engenharia de Automação
O engenheiro responsável por sistemas de automação deve atender às especificações das tarefas a serem realizadas. Alguns desses fatores devem ser interpretados através de modelos matemáticos.
Um fator que NÃO está associado a interpretações através de modelos matemáticos é o(a)
Um fator que NÃO está associado a interpretações através de modelos matemáticos é o(a)
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262979
Engenharia de Automação
O projeto de automação de uma empresa especificou elementos de controle com mais de uma entrada, produzindo componentes de erro em estado estacionário em situações como a do sistema a seguir.
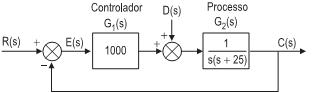
Podemos afirmar que o valor da componente do erro, nesse caso, é:
Podemos afirmar que o valor da componente do erro, nesse caso, é:
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262978
Engenharia de Automação
Os sistemas de controle envolvem componentes de diferentes tipos. Na engenharia de controle é comum representar esses componentes por modelos matemáticos. A respeito desses modelos, observe as afirmativas a seguir.
I - As relações entre entrada-saída de muitos componentes não lineares deverão ser linearizadas em torno dos pontos de operação, para limitar a faixa de variáveis.
II - O modelo matemático deve representar os aspectos essenciais de um componente físico.
III - As previsões do comportamento do sistema, baseadas no modelo matemático, devem ser razoavelmente precisas.
Está correto o que se afirma em
I - As relações entre entrada-saída de muitos componentes não lineares deverão ser linearizadas em torno dos pontos de operação, para limitar a faixa de variáveis.
II - O modelo matemático deve representar os aspectos essenciais de um componente físico.
III - As previsões do comportamento do sistema, baseadas no modelo matemático, devem ser razoavelmente precisas.
Está correto o que se afirma em
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262977
Engenharia de Automação
Os componentes conseguirem comunicar-se corretamente constitui um importante fator no projeto de uma rede de comunicação. A segurança de um sistema de automação depende de circuitos analógicos como o da figura abaixo, conectado a um amplificador.
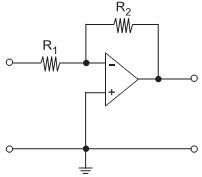
Nessas condições, o circuito desempenha a função de
Nessas condições, o circuito desempenha a função de
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262976
Engenharia de Automação
O sistema de automação de uma indústria prevê uma operação com sinais que se propagam com o comprimento de onda de 6000 angstrons e na velocidade da luz, que é de 300.000 km/s.
Tendo em vista a necessidade de utilização de sistemas sensores capazes de decodificar esses sinais, a frequência de recepção, em hertz, é
Tendo em vista a necessidade de utilização de sistemas sensores capazes de decodificar esses sinais, a frequência de recepção, em hertz, é
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262975
Engenharia de Automação
Com o objetivo de exercer o controle e a supervisão de plantas industriais, é frequente a utilização do sistema SCADA (supervisory control and data acquisition). O seu uso permite acesso a informações sobre o estado atual do sistema através de recursos que podem ser visíveis na tela dos computadores.
Outra característica importante no software, utilizada no sistema, é a
Outra característica importante no software, utilizada no sistema, é a
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262974
Engenharia de Automação
Nas instalações industriais, devido à presença de elementos não lineares como tiristores, é comum o aparecimento de componentes harmônicos na rede AC.
Qual a providência que poderá ser tomada para minimizar os efeitos desses componentes?
Qual a providência que poderá ser tomada para minimizar os efeitos desses componentes?
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262973
Engenharia de Automação
Um controlador autoprogramável (CLP) é um computador desenvolvido para desempenhar funções de controle de diversos níveis de complexidade.
Os CLP apresentam diversas características. NÃO é uma dessas características:
Os CLP apresentam diversas características. NÃO é uma dessas características:
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262972
Engenharia de Automação
Um projeto de automação desenvolvido para uma empresa em fase de crescimento necessitou instalar conversores DC-DC conforme a figura abaixo, que, nesse caso, é denominada “boost converter”.
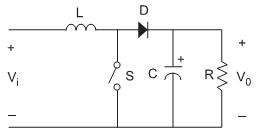
A função do indutor L nesses conversores é:
A função do indutor L nesses conversores é:
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262952
Engenharia de Automação
Um projeto de automação utiliza um sistema hidráulico que opera com resfriamento de água. A água circula através de uma bomba que a retira de um poço, à razão de 7,5 litros por segundo. O engenheiro identificou que o poço possui 10 metros de profundidade e que o rendimento da bomba é de 80%.
A potência mecânica, em HP, necessária e suficiente ao sistema hidráulico, atendendo às condições dadas, é
A potência mecânica, em HP, necessária e suficiente ao sistema hidráulico, atendendo às condições dadas, é
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262951
Engenharia de Automação
Considere as afirmativas abaixo que se referem às dificuldades que o uso de ondas de rádio em alta frequência, como alternativa aos cabos coaxiais ou fibras óticas, apresentam no processo de transmissão de dados entre redes de computadores conectados aos sistemas de automação.
I – O uso de ondas de rádio em alta frequência depende de regulamentação junto aos órgãos públicos.
II – O uso de ondas de rádio em alta frequência gera problemas de autenticação junto aos usuários.
III – O uso de ondas de rádio em alta frequência está sujeito à ocorrência de interferência entre os componentes do sistema.
IV – O uso de ondas de rádio em alta frequência impossibilita a existência de unidades transceptoras móveis.
Está correto APENAS o que se afirma em
I – O uso de ondas de rádio em alta frequência depende de regulamentação junto aos órgãos públicos.
II – O uso de ondas de rádio em alta frequência gera problemas de autenticação junto aos usuários.
III – O uso de ondas de rádio em alta frequência está sujeito à ocorrência de interferência entre os componentes do sistema.
IV – O uso de ondas de rádio em alta frequência impossibilita a existência de unidades transceptoras móveis.
Está correto APENAS o que se afirma em
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262949
Engenharia de Automação
A análise de sistemas de controle de automação envolve conhecimentos sobre o funcionamento de seus componentes eletrônicos. A esse respeito são feitas as afirmativas:
I – Ao se aplicar um pulso positivo à porta (gate) de um SCR, este continua conduzindo, mesmo que o sinal de disparo seja retirado, e assim permanece enquanto houver uma corrente mínima circulando entre anodo e catodo, chamada corrente de manutenção.
II – O IGBT é um componente eletrônico cujo controle de condução entre o coletor e o emissor é feito por tensão ao invés de corrente.
III – Um TRIAC é um elemento bidirecional, ou seja, pode conduzir nos dois semiciclos de uma senoide.
Está correto o que se afirma em
I – Ao se aplicar um pulso positivo à porta (gate) de um SCR, este continua conduzindo, mesmo que o sinal de disparo seja retirado, e assim permanece enquanto houver uma corrente mínima circulando entre anodo e catodo, chamada corrente de manutenção.
II – O IGBT é um componente eletrônico cujo controle de condução entre o coletor e o emissor é feito por tensão ao invés de corrente.
III – Um TRIAC é um elemento bidirecional, ou seja, pode conduzir nos dois semiciclos de uma senoide.
Está correto o que se afirma em
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262944
Engenharia de Automação
Um sistema dinâmico, utilizado para controle de uma rede automatizada, forneceu dados processados ao longo do tempo e que permitiram a construção do quadro abaixo.
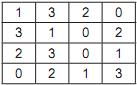
A partir dos dados assinalados, mantendo-se a mesma disposição, construiu-se uma matriz M.
O valor do determinante associado à matriz M é
A partir dos dados assinalados, mantendo-se a mesma disposição, construiu-se uma matriz M.
O valor do determinante associado à matriz M é
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262941
Engenharia de Automação
A maioria das empresas procura, atualmente, otimizar a conectividade de suas redes através da automação baseada em soluções da tecnologia da informação. Já é comum a interligação de controladores e de outros dispositivos com tendência aos barramentos de campo, que serão gradualmente integrados a outros sistemas de automação.
Tendo em vista a necessidade crescente de segurança no sistema de automação, os usuários podem assumir alguns cuidados, como
Tendo em vista a necessidade crescente de segurança no sistema de automação, os usuários podem assumir alguns cuidados, como
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262940
Engenharia de Automação
Atualmente, muitos sistemas têm sido desenvolvidos na parte física do processo de automação industrial, destacando-se a transmissão de informação para controle das operações. As redes fazem a comunicação entre diferentes setores com o objetivo de trocar informações.
As chamadas redes de chão de fábrica
As chamadas redes de chão de fábrica
Q262804
Engenharia de Automação
Para simplificar o problema de transmissão de dados, as redes de computadores são estruturadas em camadas, as quais se encarregam de funções específicas.
No modelo de referência OSI, a camada que realiza controle de acesso ao meio é
No modelo de referência OSI, a camada que realiza controle de acesso ao meio é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192353
Engenharia de Automação
A equação recursiva a seguir gera a sequência causal y(n).
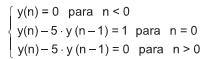
A expressão de y(n) para n ≥ 0 é
A expressão de y(n) para n ≥ 0 é